VIAM LAB PROJECTS : YouTube Channel>>
A. ROBOTICS
B. AUTOMATION
C. SMART HOME
Digital water curtainis an image display system with water by controlling the opening and closing valves in a given scenario.In recent years, these systems have appeared more and more, bringing about economic benefits and are widely applied in the field of decoration, advertising for events, commercial center and product showroom...With the new addition, the ability to combine music and light will evoke more emotions for users than the conventional lighting system.
The demand for equipment is huge, but the cost of investing in digital water curtain is quite high due to the need to import from abroad and the maintenance and replacement is also difficult.Therefore, the localization trend of digital water curtainin the market is an urgent need to increase competitiveness compared to imported products.

Figure 1: Digital water curtain
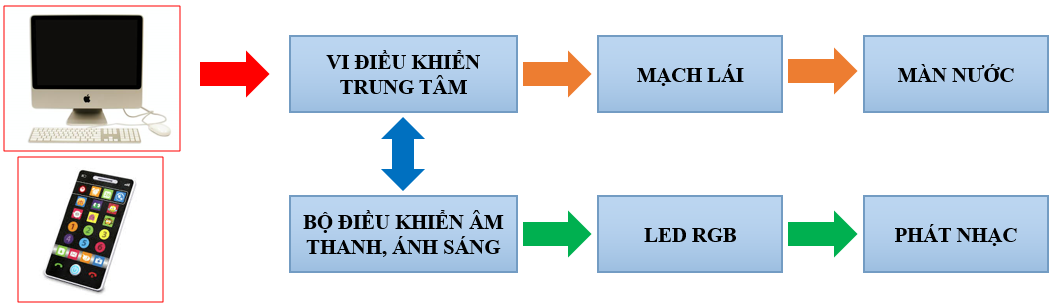
Hình 2: Control system
GUI on PC:The image import program needs to be displayed on the water screen
Smart phone:Import images or create your own picture.
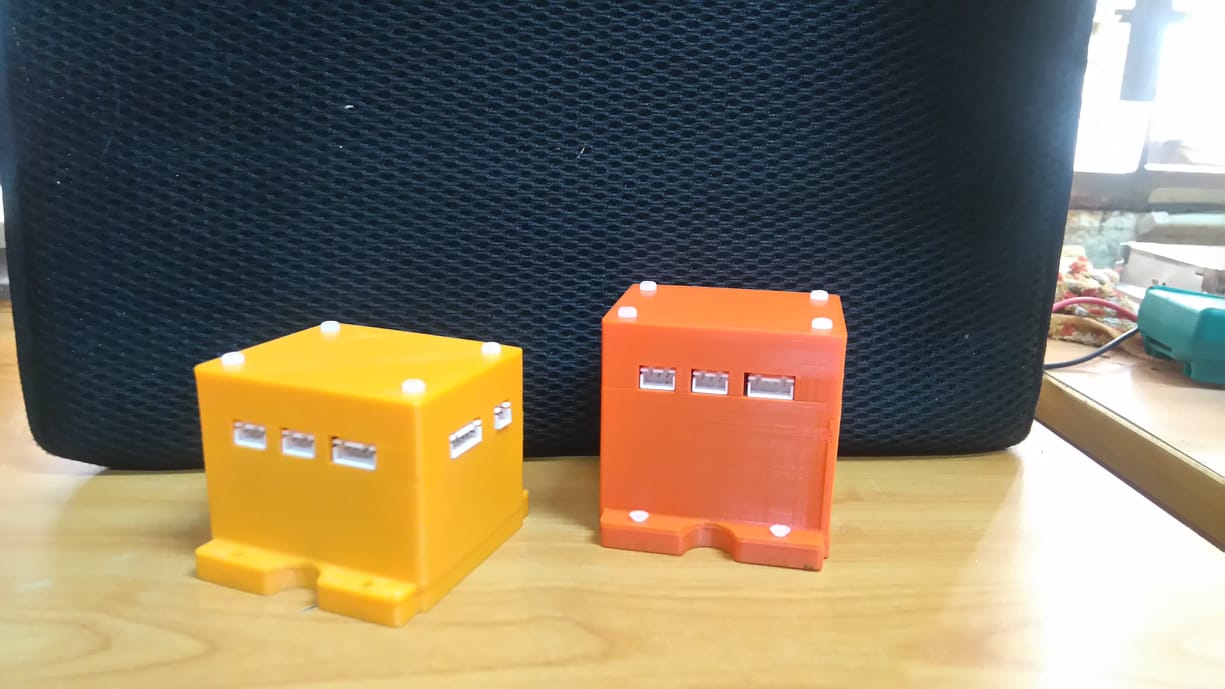
Microcontroller:Boards are mainly used to handle and control valve tasks so that an image or a preset script can be displayed on the water screen..
Driver:Used to convert the MCU signal into a water valve shutoff.
Curtain:The mechanical system is fitted with control valves.
The light controller is based on the audio signal: increase the attractive effect of digital water curtain
Watch video:
https://www.youtube.com/watch?v=PpP1KmMeC3s&list=PLc7Bg7xoyBQZgKUFUDe1HEylr_WJBuVGo&index=3
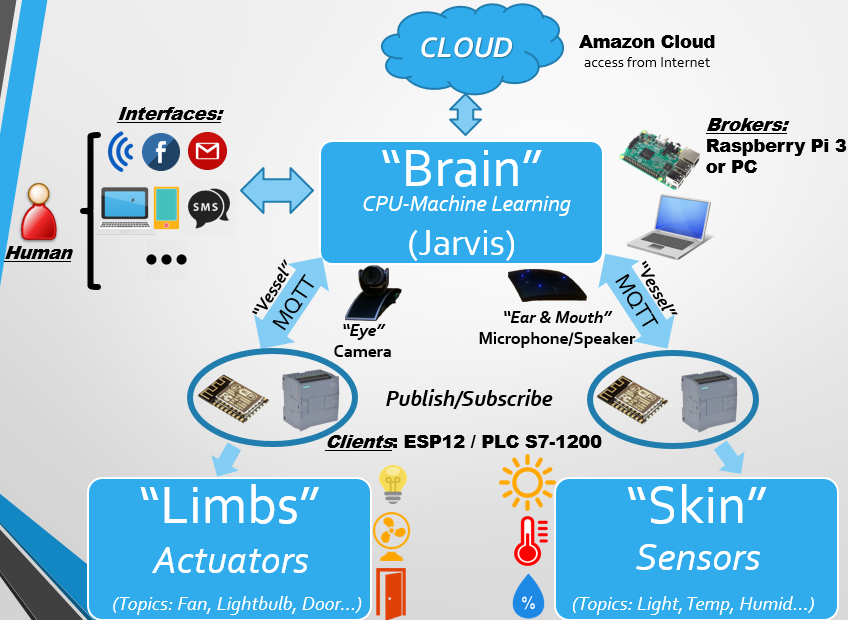
Hình 1: Structure & Algorithm of the Designed Smart Home
Xem video tại :
Nội dung thực hiện:
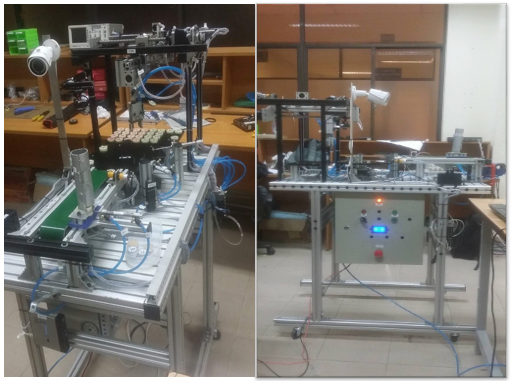
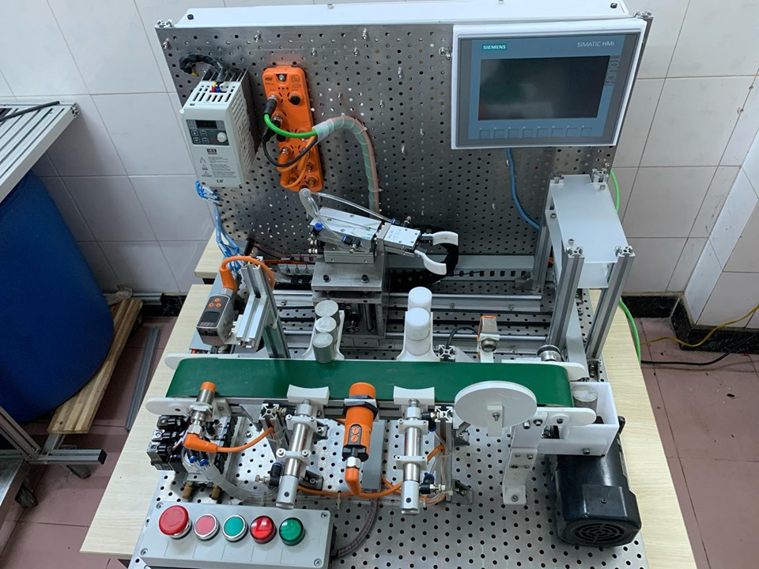
+Kết hợp các thiết bị trong tự động hóa hướng công nghiệp như xi lanh, van solenoid, băng tải, mâm xoay, tay gắp…vào mô hình phân loại sản phẩm. Đặc biệt cơ cấu gắp vật được tạo từ 2 trục X, Y là visme gắn lên động cơ bước và trục Z là xi lanh hành trình và xi lanh gắp.
+Sử dụng mô đun điều khiển chuyển động của PLC S7-1200 để điều khiển vị trí chính xác cho 2 trục động cơ X và Y và một mâm xoay.
+Sử dụng Matlab để chụp ảnh và nhận diện quân cờ, sau đó xử lý và truyền về PLC thông số vị trí theo tọa độ x, y để trạm gắp vật có thể xếp cờ vào đúng vị trí mong muốn một cách tự động.
Quan trắc, đọc trạng thái và chế độ manual để điều khiển tác động lên các thiết bị từ xa thông qua Webserver được viết trên HTML, CSS, Jquery và Javascript.
Hình 1: Object Classification System

Hình 2:Chức năng hệ thống điều khiển
Xem video tại:
Content implementation:
Figure 1: Object Classification System
Figure 2:Function control system:
Watch video:
Giới thiệu:
Nhu cầu sử dụng robot tay máy ngày càng nhiều trong các quá trình sản xuất phức tạp nhằm góp phần nâng cao năng suất, giảm giá thành, nâng cao chất lượng và độ chính xác, giảm thiểu rủi ro khi con người làm việc ở môi trường độc hại.Việc thiết kế các hệ thống robot hoạt động không cần sự can thiệp của con người đang ngày càng phổ biến, nhất là trong thời đại với sự phát triển nhanh chóng của thị giác máy tính như hiện nay.
Ứng dụng trong thực tế:
Giới thiệu:
ROV là phương tiện ngầm điều khiển từ xa bằng dây cáp và động cơ đẩy, đa dạng về hình dáng, kích thước. ROV được coi là một công cụ hiện đại giúp con người có thể khám phá thế giới dưới nước, thực hiện nhiều nhiệm vụ ở độ sâu mà con người không thể tới. Có thể làm việc dưới nước trong thời gian dài, trong môi trường khắc nghiệt. Thường có camera ghi hình, mang theo các thiết bị cảm biến và tay máy, phục vụ đa dạng tác vụ cho mục đích quân sự và dân dụng.
Ứng dụng trong thực tế:
Giới thiệu:
AUV có thể xem là bản cải tiến của ROV, là một phương tiện không người lái có khả năng tự hành cao cho các ứng dụng dưới nước. Chủ yếu có dạng ngư lôi với động cơ đẩy và cánh lái, có tính tự điều khiển. Có thể làm việc dưới nước trong thời gian dài, tùy thuộc vào nguồn năng lượng mang theo. AUV được trang bị các thiết bị cảm biến, phục vụ đa dạng tác vụ cho mục đích quân sự và dân dụng.
Ứng dụng trong thực tế:
AHRS (Attitude and Heading Reference System) là bộ ước lượng các góc hướng roll, pitch, yaw của robot tự hành với độ chính xác và tốc độ cập nhật cao. Sử dụng AHRS và các cảm biến gia tốc (accelerometer), hệ thống định vị quán tính INS (Inertial Navigation System, INS) có khả năng xác định vị trí của robot với độ chính xác cao trong thời gian đầu, tuy nhiên độ trôi của INS càng lớn theo thời gian. Kết hợp hệ thống định vị toàn cầu (Global Positioning System, GPS) với hệ thống INS giúp tăng chất lượng về nhiều mặt như độ chính xác, tốc độ cập nhật,…

Navigation algorithms
VIAM-NAVI, finished product
Ứng dụng trong thực tế:
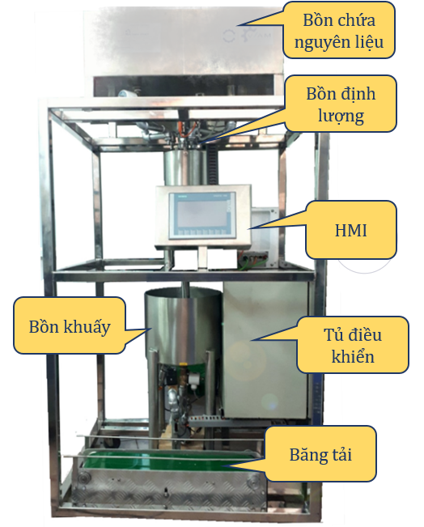
MIXING TANK SYSTEM
Hệ thống bồn trộn tái hiện lại một cách đơn giản quy trình pha trộn: Lấy nguyên liệu màu (gồm 3 màu là đỏ, xanh dương, vàng) → Định lượng ba nguyên liệu này theo tỷ lệ định sẵn → khuấy trộn theo mẻ cho ra một màu mới → thành phẩm được chiết rót vào từng lon đựng.
Tính năng:
Xem video tại:
https://www.youtube.com/watch?v=e_amv3fT85M
MIXING TANK SYSTEM
Our mixing tank system demonstrates a simple mixing process: fetching constitutive colourants (red, blue, yellow) -> computing the amount of each colourants -> mixing and blending to produce a new batch of colourant -> canning finished product.
Feature:
https://www.youtube.com/watch?v=e_amv3fT85M
HEATING TANK
Điều khiển nhiệt độ và mức chất lỏng là vấn đề được nhiều người quan tâm, đặc biệt là trong lĩnh vực công nghiệp và nông nghiệp. Trong những nhà máy có đặc thù về sản xuất các dung dịch thì yêu cầu về nhiệt độ và thể tích (hay mức) chất lỏng được đặt ra rất khắt khe. Do vậy, việc nghiên cứu một giải pháp hợp lý cho bài toán này sẽ giúp ích rất nhiều trong khâu quản lý chất lương sản phẩm, cũng như tối ưu hóa sản xuất cho doanh nghiệp.
Mô hình gồm 1 bồn điều khiển và 1 bồn chứa. Sau khi được bơm vào bồn điều khiển, chất lỏng sẽ được gia nhiệt tuần hoàn bằng điện trở đốt nóng. PLC và biến tần sẽ điều khiển bơm để có được lượng chất lỏng mong muốn. Bên cạnh đó, mô hình sử dụng bộ điều khiển PID để điều khiển nhiệt độ trong bồn. Mô hình còn được xây dựng giao diện HMI, giao diện SCADA, Web Server trong mạng LAN, xây dựng cơ sở dữ liệu, tích hợp ứng dụng IoT để giám sát hệ thống.

Hướng phát triển:
Cải thiện khả năng điều khiển nhiệt độ của hệ thống để có được khoảng nhiệt độ rộng hơn, thích hợp với nhiều hệ thống công nghiệp khác nhau
Xem video tại:
HEATING TANK
Temperature control and level control are widely concerned nowadays, especially in industry and agriculture. In the factories that specialize in producing chemical and beverage, the requirements concerning liquid’s temperature and volume (or level) are very strict. Therefore, researching a appropriate solution for this problem would be a tremendous help to quality management as well as production optimization.
Our model consists of a controlling tank and a storage tank. After being pumped into the controlling tank, the liquid is periodically heated using heater resistor. A pump is controlled by PLC and inverter to pump the required amount of liquid into the storage tank. The model also uses a PID controller to control the tank temperature. Additionally, the model is equipped with HMI interface, SCADA interface, LAN based web server, IOT-intergrated database to supervise the system
Under development:
Watch video:
Mô hình chiết rót được xây dựng dựa theo các hệ thống chiết rót trong các nhà máy sản xuất nước giải khát, nước lọc, hóa chất…
Qui trình vận hành: Chai được đưa vào hệ thống và di chuyển dựa vào băng tải → Cảm biến phát hiện chai và cho ngừng băng tải → Hệ thống chiết rót nước từ bồn chứa → Cảm biến lưu lượng sẽ đo lượng nước chiết rót → Lượng nước chiết rót đủ thì hệ thống ngừng chiết rót và băng tải chạy đưa chai di chuyển và bắt đầu lại quy trình chiết rót chai mới.

Tính năng:
Xem video tại:
https://www.youtube.com/watch?v=U8B5QlTnp_k
Our filling model is built based on the design of the filling systems used in beverage, chemical factories,...
Operation: A bottle is brought into the system and carried along the conveyor -> the sensors detect the bottle and stop the conveyor -> the system fills the bottle with water from the storage tank -> the amount of water is measured by a flow sensor -> when the bottle is full, the system stop pumping out water, the conveyor moves again and a new filling process begin
Feature:
Watch video at:
https://www.youtube.com/watch?v=U8B5QlTnp_k
Việc phân loại sản phẩm theo đặc tính của sản phẩm rất phổ biến trong công nghiệp như phân loại sản phẩm không đạt chất lượng, theo màu sắc, chiều cao ,.. để có thể sắp xếp các sản phẩm có cùng đặc tính với nhau .Trong mô hình này sử dụng đặc điểm chất liệu và chiều cao để phân loại sản phẩm.
Quy trình vận hành: Sản phẩm được đưa vào băng chuyền -> cảm biến chiều cao sẽ đo chiều cao -> cảm biến kim loại sẽ nhận biết chất có phải kim loại không -> Nếu là kim loại và đặt chiều cao thì xylanh đẩy sản phẩm ra khay rồi tay máy sẽ gắp sản phẩm bỏ vào kho tầng 2 ( kho có 2 tầng : tầng 1: phi kim, tầng 2: kim loại) -> Nếu sản phẩm là kim loại mà không đúng chiều cao thì sản phẩm sẽ đi hết băng tải -> Có cảm biến phi kim -> Nếu sản phẩm là phi kim và đúng chiều cao thì xylanh đẩy sản phẩm ra khay rồi tay máy gắp sản phẩm bỏ bào kho tâng 1.
Tính năng:
https://www.youtube.com/watch?v=1EtWtBvE8u0
The classification of products according to the characteristics of the products is very popular in the industry such as classification of substandard products, according to color, height, ... so that products with similar characteristics can be arranged. In this model, the material and height characteristics are used to classify products.
Operating procedure: The product is put on the conveyor belt -> the height sensor will measure the height -> the metal sensor will recognize whether the material is metal -> If it is metal and set the height, the cylinder will push then the product will pick up the product tray into the hands on the second floor warehouse (store has 2 floors: 1st floor: nonmetals, 2nd floor: metal) -> If the product is metal but not the correct height, the product will go out of the conveyor -> non-metallic sensor -> If the product is non-metal and the correct height, the cylinder pushes the product to the tray and then the picker takes the product away
Feature
Watch video at:
https://www.youtube.com/watch?v=1EtWtBvE8u0
Giới thiệu:
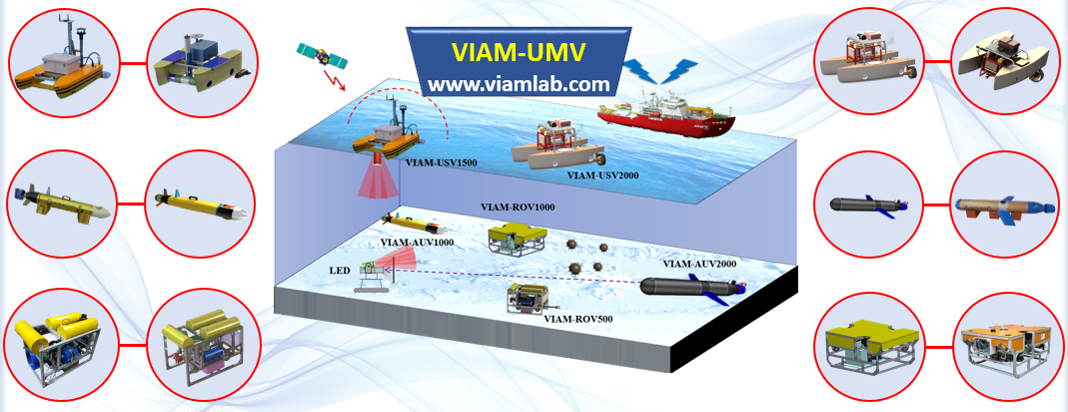
Nhiều ứng dụng khác nhau trong một giải pháp hoàn thiện - USV được coi là phương tiện hiện đại ngày nay giúp cho con người khám phá nhiều hơn về môi trường nước, đặc biệt là biển. USV là một phương tiện không người lái vận hành trên mặt nước, nó có thể được điều khiển từ xa hoặc tự điều khiển để làm những nhiệm vụ khác nhau.
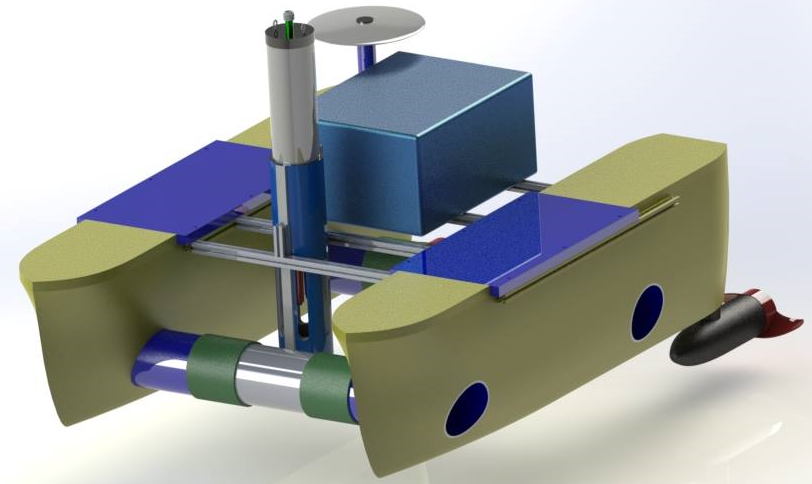
UNMANNED SURFACE VEHICLE (USV)
Ứng dụng trong thực tế:
Ngày nay, USV được ứng dụng rộng rãi trên thế giới trong các mảng như:
Ngoài ra USV còn có thể kết hợp với AUV, ROV, UAV tạo thành hệ thống tự động tự hành cho các tác vụ lớn cả trên không và dưới nước.
Các phiên bản dự án nghiên cứu hiện tại: >>
Introduction
Unmaned Surface Vehicle - USV is known as a modern vehicle which assists people in discovering water enviroment.It can either be remotely controlled or operate automatically to fulfill different tasks.
UNMANNED SURFACE VEHICLE (USV)
Application:
Nowadays, USV is used all around the world in a variety of fields such as:
Introduction:
The need for robots is increasing in complex manufacturing processes that contribute to increased productivity, reduced costs, improved quality and accuracy, and reduced risk when people work at dangerous environment.The design of robotic systems operating without human intervention is becoming more and more popular, especially in the era of rapid development of computer vision today.
Application:
Introduction:
AHRS (Attitude and Heading Reference System) is an estimate of the angles of roll, pitch, yaw of self-propelled robots with high accuracy and updating speed. Using AHRS and accelerometer sensors, Inertial Navigation System (INS) is able to locate the robot with high accuracy at the beginning but the INS drift is greater with time.Combining Global Positioning System (GPS) with INS system increases the quality in many aspects such as accuracy, speed update, ...
Navigation algorithms
VIAM-NAVI, finished product
Application:
Introduction:
The AUV can be considered as an improved version of the ROV, which is a highly autonomous unmanned vehicle for underwater applications.Mostly of the torpedo type with propulsion and steering, self-controlled.Can work under water for long periods of time, depending on the source of energy.AUV is equipped with sensor devices, serving a variety of tasks for military and civil purposes.
Application:
Introduction:
ROV is an underwater vehicle remotely controlled by cables and thrusters, varied in shape and size.ROV is regarded as a modern tool that enables people to explore the underwater world, perform many tasks at depths that humans can not reach.It can work under water for long periods, in harsh environment.Often there is a video camera, carrying sensors and hand-held machines, serving a variety of tasks for military and civil purposes.
Application:
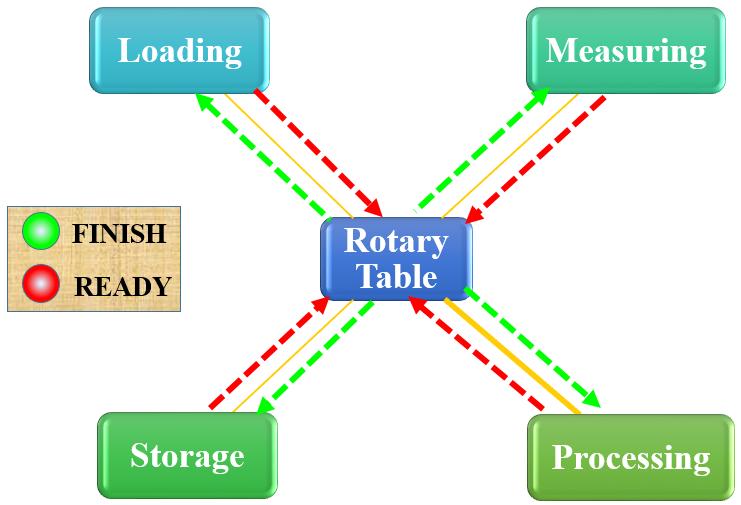
Hình 1: Flexible Manufacturing System
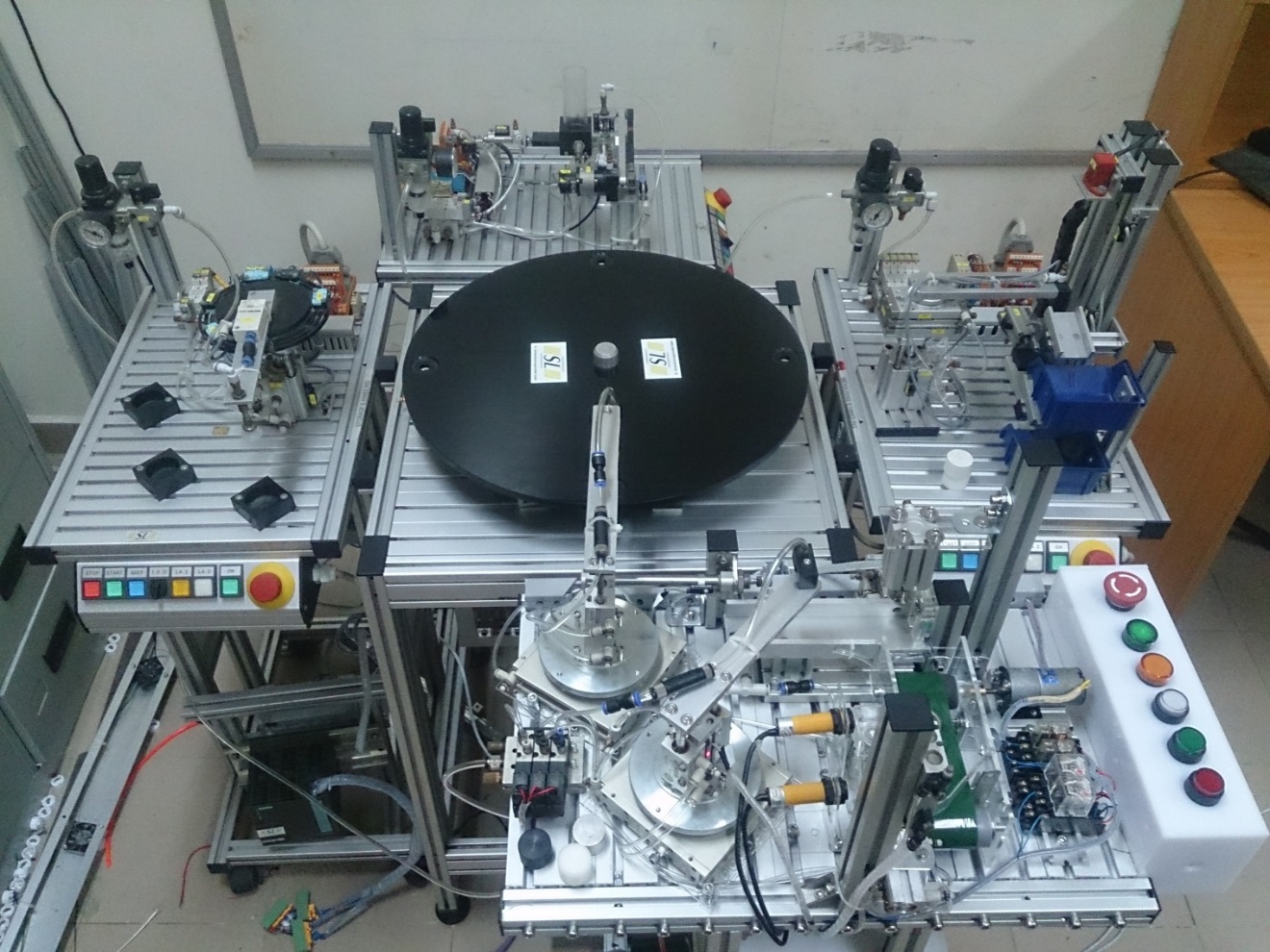
Hình 2:Flexible Manufacturing System
Xem video tại:
Figure 1: Flexible Manufacturing System
Figure 2:Flexible Manufacturing System
Watch video :
Thực tế tăng cường(Augmented reality -AR) là sự tích hợp các thông tin từ máy tính vào môi trường thực tế, trong đó việc chèn hình ảnh vào tầm nhìn của người dùng chiếm đa số. Công nghệ AR cải thiện khả năng làm việc của công nhân để tăng năng suất làm việc, nó cung cấp môi trường an toàn và nâng cao sự hài lòng trong công việc của công nhân.
Ứng dụng của AR:
Clip demo thực tế tăng cường điều khiển động cơ 3 pha và biến tần
Augmented reality demo with inverter