
ROBOT LỄ TÂN
Giới thiệu:
Robot Lễ tân là robot di động được thiết kế để hoạt động trong trường nhằm hỗ trợ chuyển đổi số tại môi trường trường học.

Hình 1: Robot lễ tân.
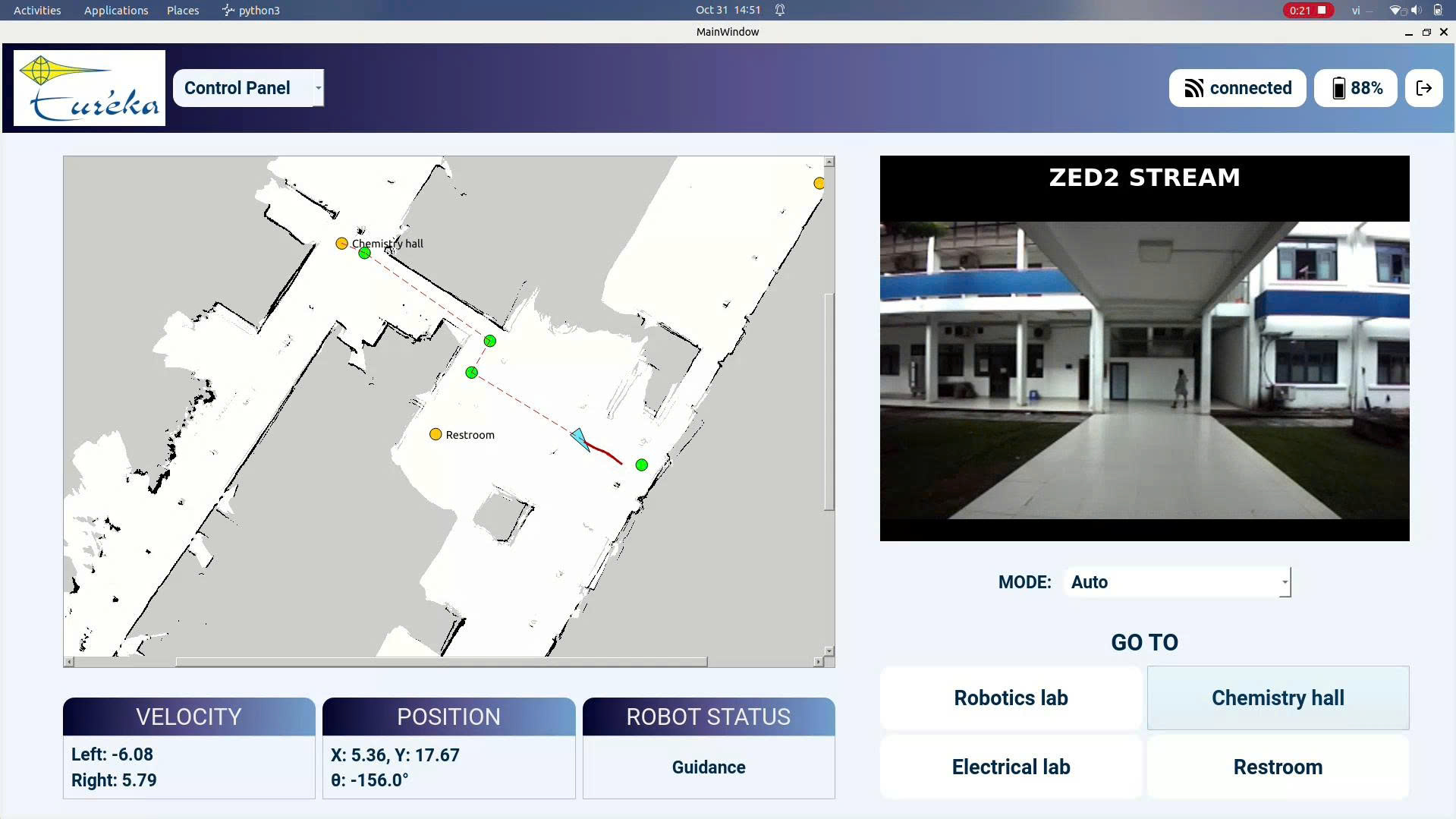
Hình 2: Giao diện giám sát.
Ứng dụng:
- Hướng dẫn thông tin: Cung cấp thông tin và hỏi đáp qua Chatbot.
- Hỗ trợ điểm danh: Thực hiện việc điểm danh.
- Dẫn đường: Hướng dẫn và dẫn đường cho người dùng đến các địa điểm như phòng lab, phòng học, hoặc nhà vệ sinh.
- Giao vật phẩm: Thực hiện giao nhận vật phẩm theo biểu mẫu.
ROBOT GIAO HÀNG
Giới thiệu:
Robot Giao hàng là robot hỗ trợ chuyển đổi số trong trường học , với ứng dụng chính là vận chuyển hàng hóa. Robot được phát triển với mục tiêu có thể tự vận hành ở các khu vực ngoài trời , cho phép người dùng đặt hàng và theo dõi trạng thái hoạt động của xe trong thời gian thực thông qua ứng dụng.

Hình 1: Robot giao hàng.
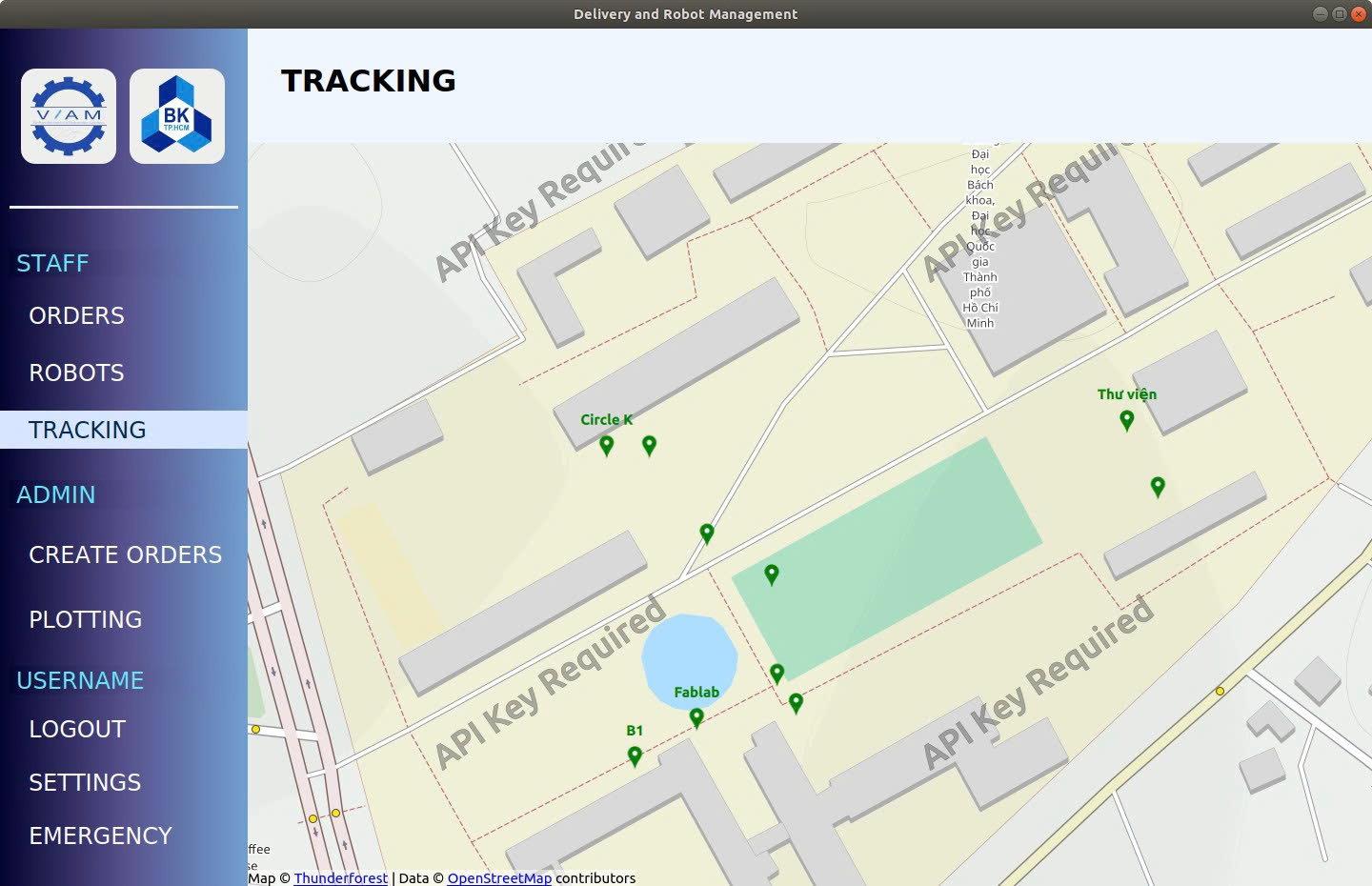
Hình 2: Giao diện giám sát.
Ứng dụng:
- Vận chuyển hàng hóa.
- Thúc đẩy chuyển đổi số trong quản lý và dịch vụ.
- Nâng cao trải nghiệm người dùng.
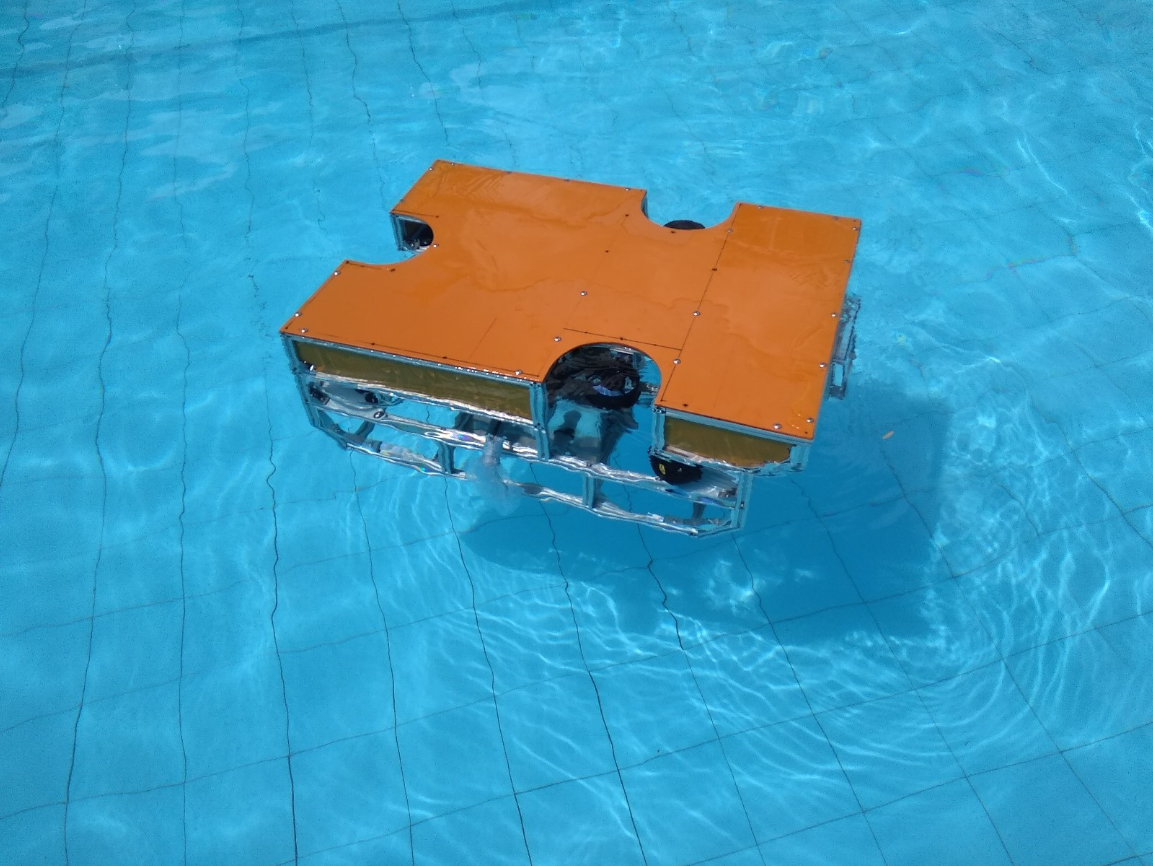
PHƯƠNG TIỆN MẶT NƯỚC KHÔNG NGƯỜI LÁI (USV)
Giới thiệu:
Phương tiện mặt nước không người lái – USV được biết đến như một phương tiện hiện đại hỗ trợ con người trong việc khám phá môi trường nước. Nó có thể được điều khiển từ xa hoặc tự động vận hành để thực hiện nhiều nhiệm vụ khác nhau.
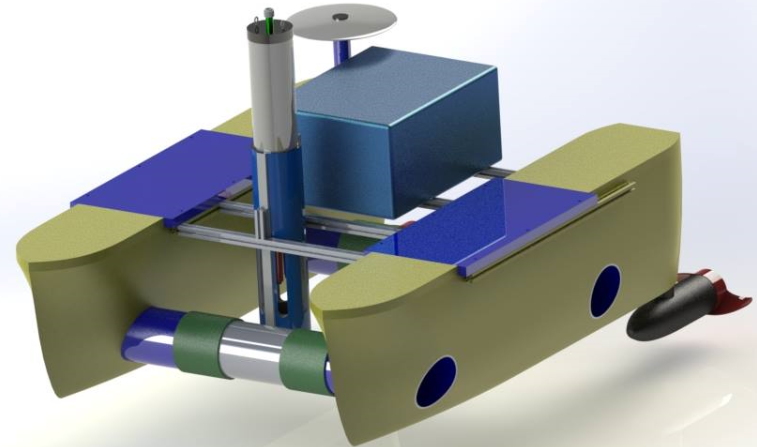
Hình 1: Phương tiện mặt nước không người lái (USV)

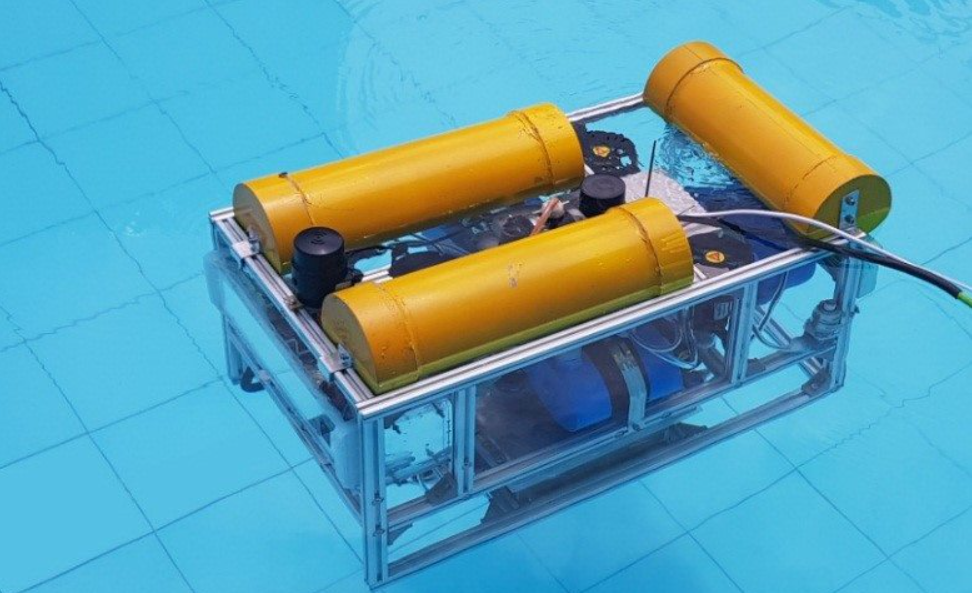
Hình 2: KIAL-UDB, sản phẩm hoàn thiện
Ứng dụng:
- Nghiên cứu và giám sát môi trường.
- Lấy mẫu nước
- Vẽ bản đồ
- Tuần tra và trinh sát
- Truyền thông tin hoặc mang thiết bị.
- Có thể vũ trang hóa và sử dụng cho nhiều mục đích trong quân sự.
- Ngoài ra, USV có thể kết hợp với AUV, ROV và UAV để tạo thành một hệ thống tự động phục vụ nhiều mục đích cả trên không và dưới nước.
Xem video:
PHƯƠNG TIỆN DƯỚI NƯỚC ĐIỀU KHIỂN TỪ XA (ROV)
Giới thiệu:
ROV là phương tiện dưới nước được điều khiển từ xa bằng cáp và động cơ đẩy, đa dạng về hình dạng và kích thước. ROV được coi là công cụ hiện đại giúp con người khám phá thế giới dưới nước, thực hiện nhiều nhiệm vụ ở độ sâu mà con người không thể tiếp cận. Nó có thể làm việc dưới nước trong thời gian dài, trong môi trường khắc nghiệt. Thường được trang bị camera, cảm biến và cánh tay cơ khí, phục vụ nhiều nhiệm vụ quân sự và dân sự.
Hình 1: VIAM – ROV500
Hình 2: VIAM – ROV900
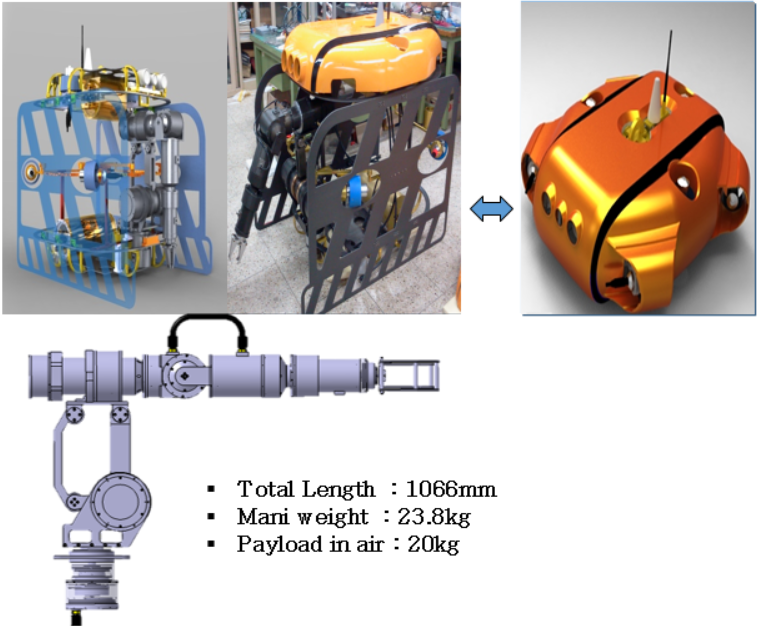
Hình 3: KIAL – CROV
Ứng dụng:
- Lắp đặt / gỡ bỏ mìn, ngư lôi
- Hỗ trợ con người trong chiến đấu
- Tuần tra, an ninh và cứu hộ
- Thăm dò dầu khí, khoáng sản
- Đóng/mở van, sửa chữa đường ống, bảo trì giàn khoan
- Đào, lắp đặt, kiểm tra tình trạng cáp ngầm
- Thu thập thông tin địa lý, sinh vật biển
- Khảo cổ dưới nước, khám phá tàu đắm
Xem video:
PHƯƠNG TIỆN TỰ HÀNH DƯỚI NƯỚC (AUV)
Giới thiệu:
AUV có thể được xem là phiên bản cải tiến của ROV, là một phương tiện không người lái có tính tự động cao phục vụ cho các ứng dụng dưới nước. Thường có dạng ngư lôi với hệ thống đẩy và điều hướng, tự điều khiển. Có thể hoạt động dưới nước trong thời gian dài, tùy thuộc vào nguồn năng lượng. AUV được trang bị các thiết bị cảm biến, phục vụ nhiều nhiệm vụ khác nhau cho mục đích quân sự và dân sự.
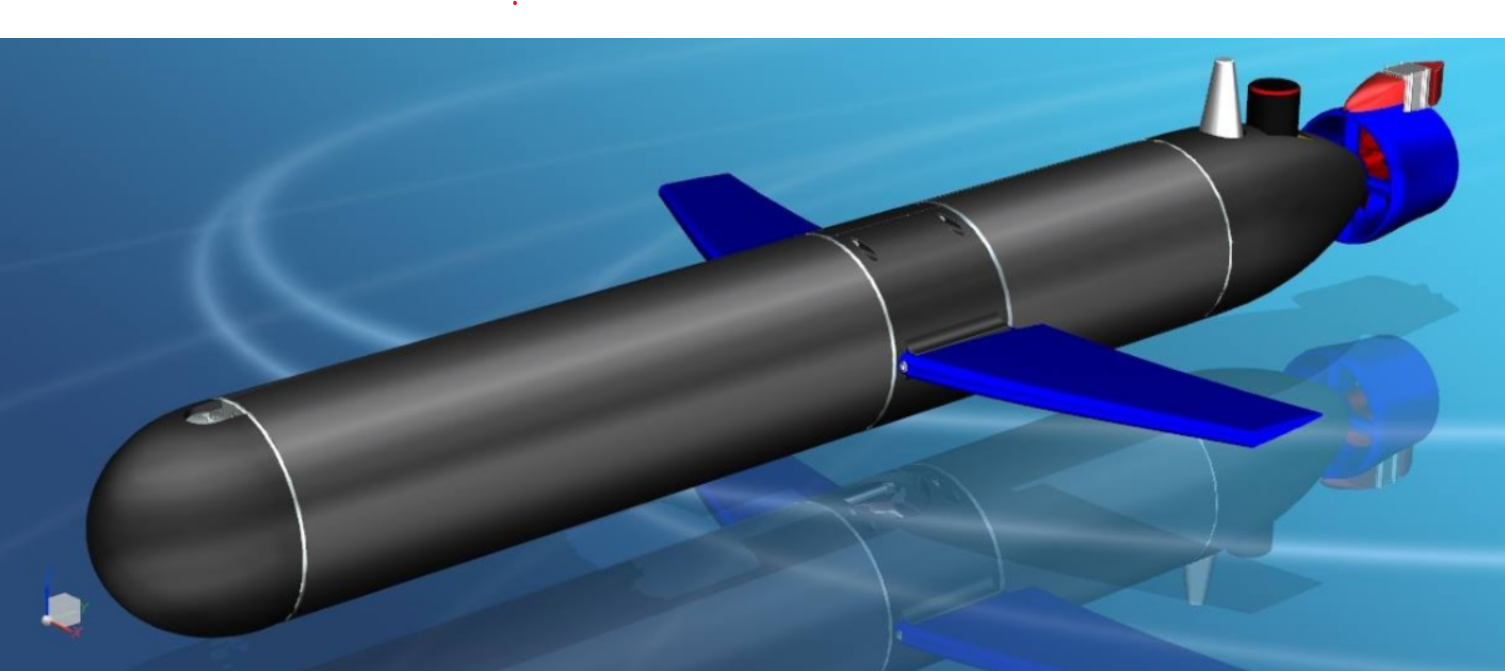
Hình 1: VIAM-AUV2000
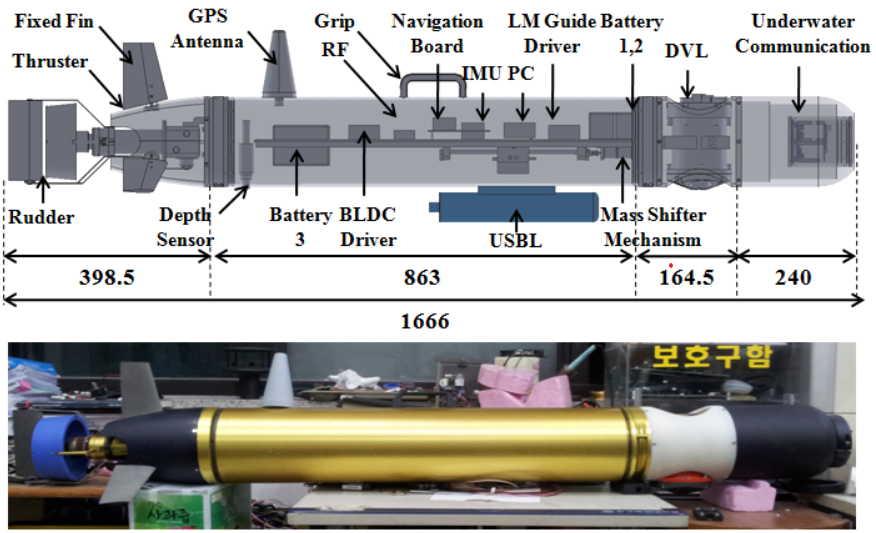
Hình 2: KIAL-AUV
Ứng dụng:
- Lập bản đồ đáy biển
- Khảo sát và giám sát theo khu vực
- Khảo sát địa chất bề mặt, thu thập thông tin về mỏ và khoáng sản
- Phát hiện, tiêu diệt mục tiêu dưới nước, rà phá thủy lôi
- Thu thập thông tin, giám sát và trinh sát
- Chiến tranh tàu ngầm, khảo sát và nhận dạng
- Truyền thông tin và định vị dưới nước
- Hỗ trợ tấn công và phòng thủ
- Nhiệm vụ đặc biệt (ngư lôi, thả mìn…)
Xem video:
ĐIỀU HƯỚNG
Giới thiệu:
AHRS (Hệ thống tham chiếu góc nghiêng và hướng) là phép ước lượng các góc lăn, nghiêng, xoay của robot tự hành với độ chính xác và tốc độ cập nhật cao. Sử dụng AHRS và cảm biến gia tốc, Hệ thống định vị quán tính (INS) có thể xác định vị trí của robot với độ chính xác cao ban đầu nhưng INS bị trôi theo thời gian. Kết hợp Hệ thống định vị toàn cầu (GPS) với INS giúp nâng cao chất lượng ở nhiều khía cạnh như độ chính xác, tốc độ cập nhật,…

Thuật toán điều hướng

VIAM-NAVI, sản phẩm hoàn chỉnh
Ứng dụng:
- Định vị trên mặt đất, mặt nước, dưới nước.
- Dẫn đường cho phương tiện tự hành
- Cung cấp dữ liệu đầu vào cần thiết cho các ứng dụng điều khiển nâng cao như định vị, cân bằng,…
Xem video:
ỨNG DỤNG CÁNH TAY ROBOT
Giới thiệu:
Nhu cầu sử dụng robot ngày càng tăng trong các quy trình sản xuất phức tạp, góp phần nâng cao năng suất, giảm chi phí, cải thiện chất lượng và độ chính xác, đồng thời giảm rủi ro khi con người làm việc trong môi trường nguy hiểm. Việc thiết kế các hệ thống robot hoạt động không cần sự can thiệp của con người ngày càng phổ biến, đặc biệt trong thời đại thị giác máy tính phát triển mạnh mẽ hiện nay.

Ứng dụng:
- Gấp và phân loại vật thể trên băng chuyền động
- Hàn các vật thể phức tạp
- Sơn sản phẩm
- Thay thế công nhân trong môi trường nguy hiểm và hoạt động liên tục
Xem video:
HỆ THỐNG SẢN XUẤT LINH HOẠT
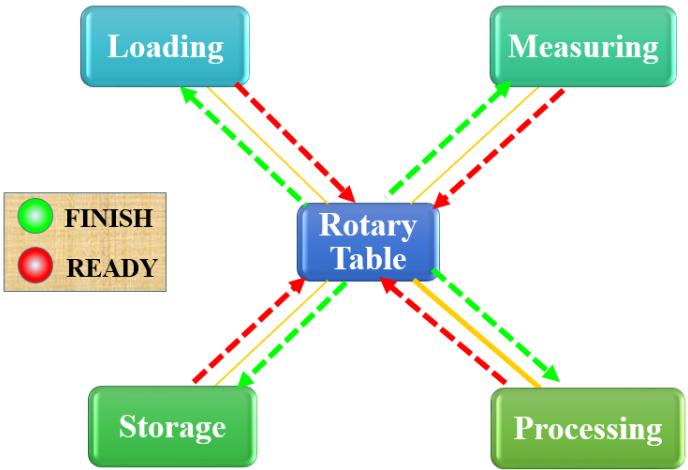
Hình 1: Hệ Thống Sản Xuất Linh Hoạt
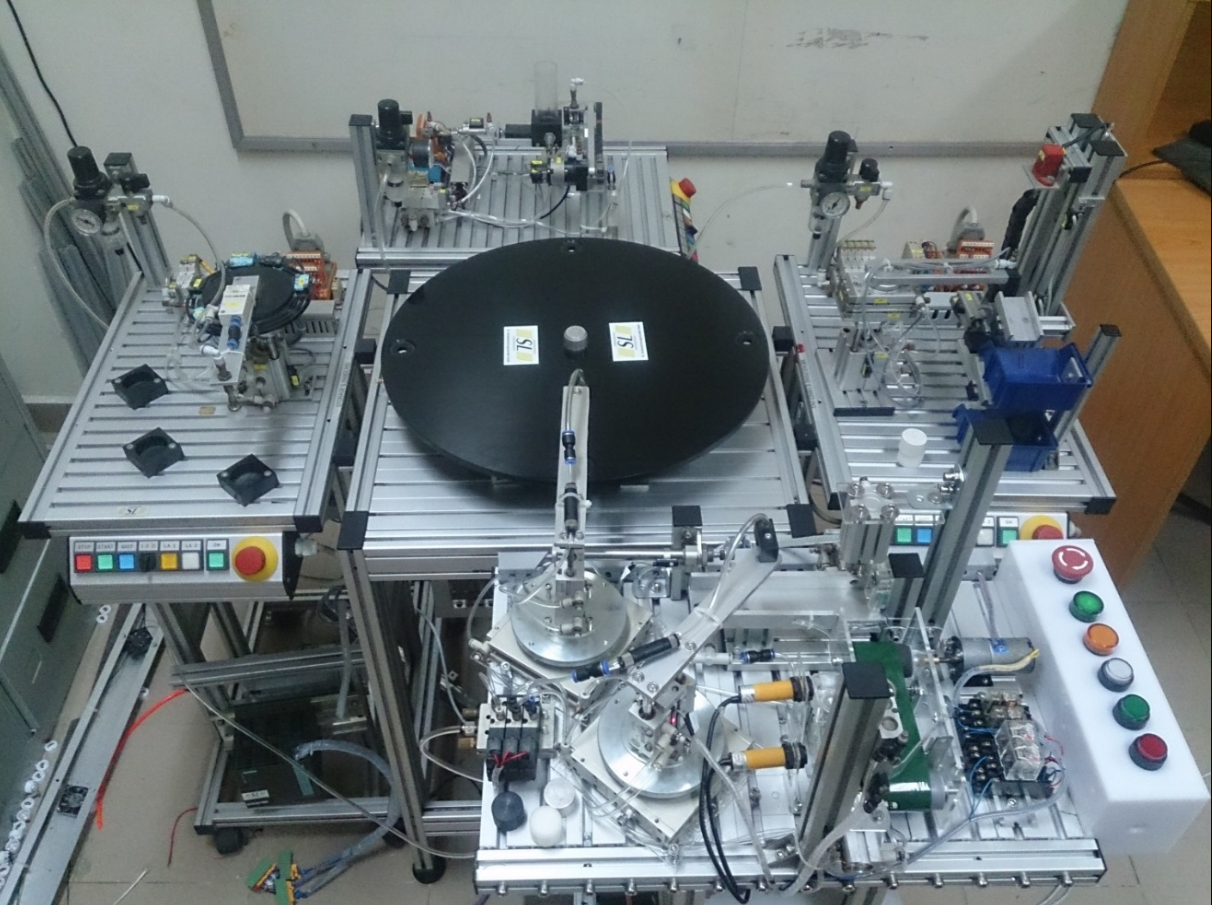
Hình 2: Hệ Thống Sản Xuất Linh Hoạt
Xem video:
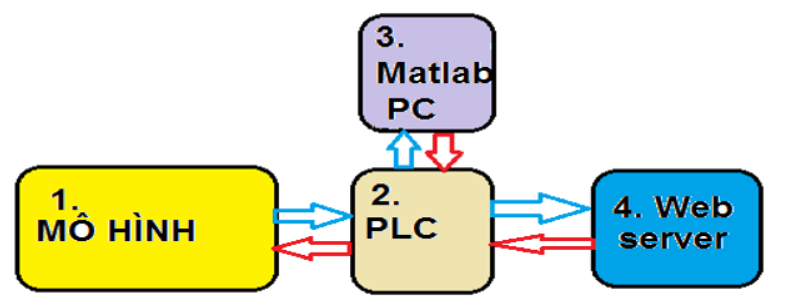
HỆ THỐNG PHÂN LOẠI VẬT THỂ
- Kết hợp các thiết bị trong tự động hóa công nghiệp như xy lanh, van điện từ, băng tải, tay quay, tay gắp … vào mô hình phân loại sản phẩm. Đặc biệt, cơ cấu gắp được chế tạo từ hai trục X, Y là trục vít me gắn với động cơ bước và trục Z là xy lanh hành trình và xy lanh gắp.
- Sử dụng module điều khiển chuyển động của PLC S7-1200 để điều khiển vị trí cho hai động cơ trục X, Y và một bàn xoay.
- Sử dụng Matlab để chụp và nhận dạng quân cờ, sau đó xử lý và truyền tham số vị trí PLC theo tọa độ x, y để trạm có thể định vị quân cờ đến vị trí mong muốn một cách tự động.
- Giám sát, đọc trạng thái và chế độ thủ công để điều khiển các tác động lên thiết bị từ xa thông qua Webserver được viết bằng HTML, CSS, Jquery và Javascript.
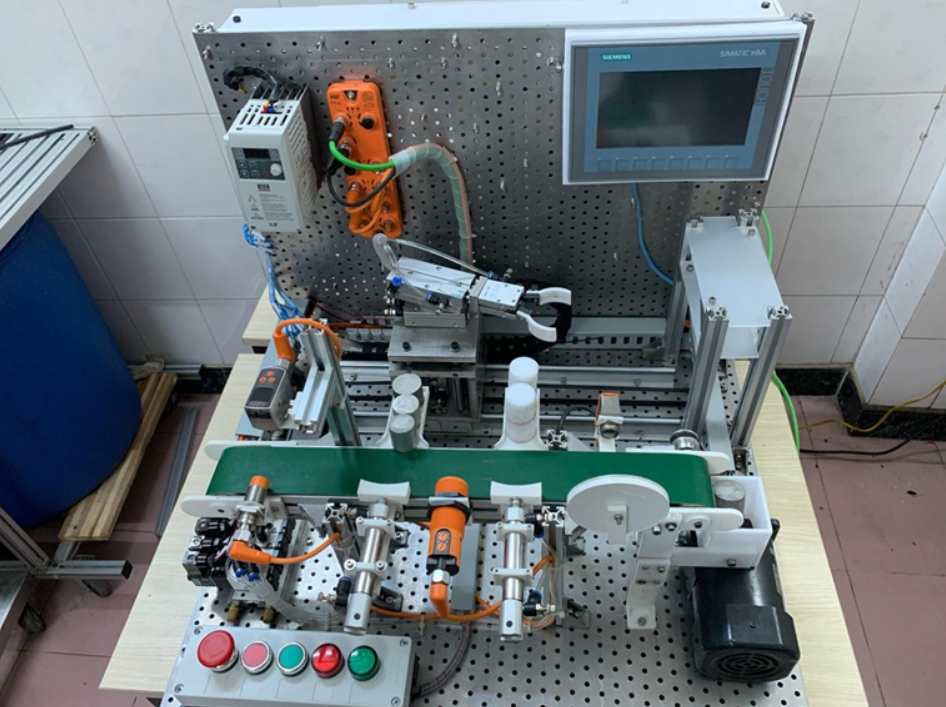
Hình 1: Hệ Thống Phân Loại Vật Thể
Hình 2: Hệ Thống Điều Khiển Chức Năng
Xem video:
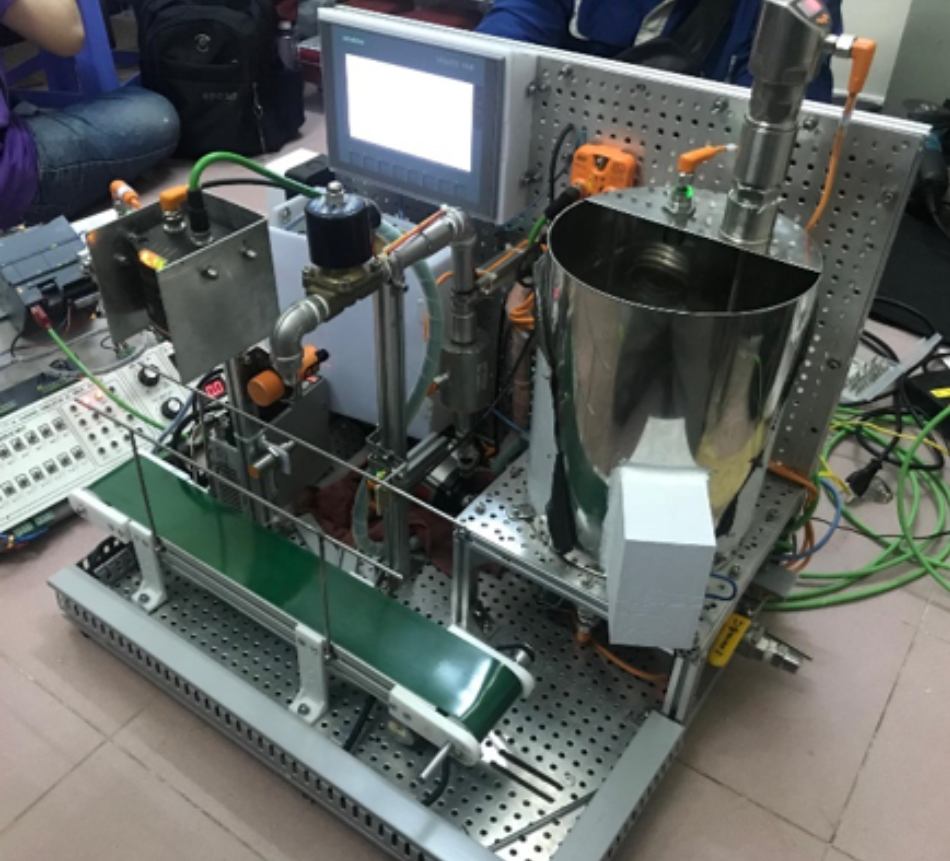
HỆ THỐNG BỒN KHUẤY TRỘN
Hệ thống bồn khuấy trộn của chúng tôi mô phỏng một quá trình trộn đơn giản: lấy các chất tạo màu cơ bản (đỏ, xanh dương, vàng) -> tính toán lượng của từng chất tạo màu -> khuấy trộn để tạo ra một mẻ màu mới -> đóng lon sản phẩm hoàn thiện.
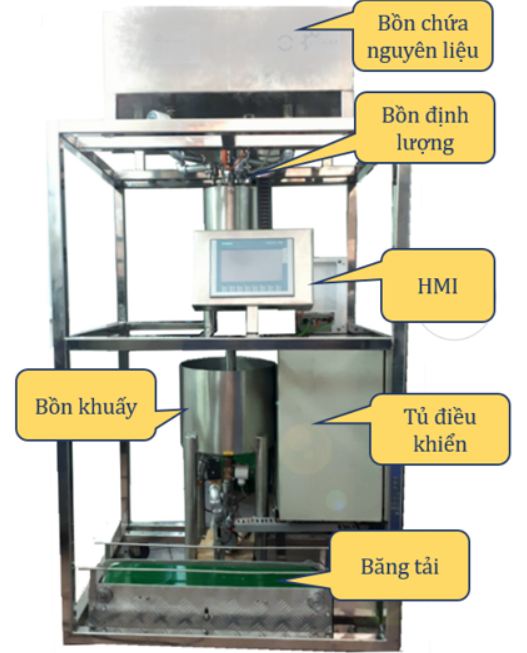
Đặc điểm:
- Điều khiển trực tiếp bằng HMI
- Điều khiển giám sát từ xa thông qua SCADA và WebServer
Xem video:
BỒN GIA NHIỆT
Kiểm soát nhiệt độ và mực chất lỏng là vấn đề được quan tâm rộng rãi hiện nay, đặc biệt trong công nghiệp và nông nghiệp. Tại các nhà máy chuyên sản xuất hóa chất và đồ uống, yêu cầu về nhiệt độ và thể tích (hoặc mực chất lỏng) rất nghiêm ngặt. Do đó, nghiên cứu một giải pháp thích hợp cho vấn đề này sẽ hỗ trợ rất nhiều cho việc quản lý chất lượng cũng như tối ưu hóa sản xuất.
Mô hình của chúng tôi bao gồm một bồn điều khiển và một bồn chứa. Sau khi được bơm vào bồn điều khiển, chất lỏng được gia nhiệt định kỳ bằng điện trở gia nhiệt. Một máy bơm được điều khiển bởi PLC và biến tần để bơm lượng chất lỏng cần thiết vào bồn chứa. Mô hình cũng sử dụng bộ điều khiển PID để kiểm soát nhiệt độ bồn. Ngoài ra, mô hình còn được trang bị giao diện HMI, giao diện SCADA, web server dựa trên LAN và cơ sở dữ liệu tích hợp IOT để giám sát hệ thống.

Đang phát triển:
- Kết hợp với các hệ thống khác để hình thành dây chuyền sản xuất quy mô lớn
- Tích hợp hệ thống làm lạnh vào bơm đầu ra,…
- Mở rộng dải nhiệt độ điều khiển để thích ứng với nhiều loại hệ thống công nghiệp khác nhau
Xem video:
HỆ THỐNG CHIẾT RÓT
Mô hình chiết rót của chúng tôi được xây dựng dựa trên thiết kế của các hệ thống chiết rót được sử dụng trong các nhà máy đồ uống, hóa chất,…
Nguyên lý hoạt động: Một chai được đưa vào hệ thống và di chuyển trên băng tải -> cảm biến phát hiện chai và dừng băng tải -> hệ thống chiết rót nước từ bồn chứa vào chai -> lượng nước được đo bằng cảm biến lưu lượng -> khi chai đầy, hệ thống ngừng bơm nước, băng tải di chuyển tiếp và một chu trình chiết rót mới bắt đầu.
Tính năng:
- Điều khiển trực tiếp bằng màn hình HMI
- Giám sát và điều khiển từ xa thông qua SCADA và WebServer
- Nhiệt độ bồn chứa có thể được điều khiển bằng bộ điều khiển PID
- Cảm biến IFM với giao tiếp I/O Link
- Băng tải được điều khiển chính xác bằng RS-Servo
- Hệ thống phân loại sản phẩm sử dụng camera
Xem video tại:
HỆ THỐNG PHÂN LOẠI VÀ LƯU TRỮ
Việc phân loại sản phẩm theo đặc điểm của chúng rất phổ biến trong công nghiệp, chẳng hạn như phân loại sản phẩm không đạt tiêu chuẩn, theo màu sắc, chiều cao,… để các sản phẩm có cùng đặc điểm được sắp xếp. Trong mô hình này, vật liệu và chiều cao được sử dụng để phân loại sản phẩm.
Quy trình vận hành: Sản phẩm được đưa lên băng tải -> cảm biến chiều cao sẽ đo chiều cao -> cảm biến kim loại sẽ nhận biết sản phẩm có phải là kim loại hay không -> nếu là kim loại và có chiều cao đạt yêu cầu, xi lanh sẽ đẩy sản phẩm, sau đó bộ gắp đưa sản phẩm vào khay ở tầng 2 của kho (kho có 2 tầng: tầng 1 chứa phi kim, tầng 2 chứa kim loại) -> nếu là kim loại nhưng không đạt chiều cao, sản phẩm sẽ đi ra khỏi băng tải -> cảm biến phi kim -> nếu là phi kim và có chiều cao đúng, xi lanh sẽ đẩy sản phẩm vào khay rồi bộ gắp sẽ lấy sản phẩm đi.
Tính năng:
- Điều khiển qua màn hình HMI
- Cảm biến IFM với giao tiếp IO-Link
- Bộ gắp ổn định
- Điều khiển băng tải bằng biến tần
Xem video tại:
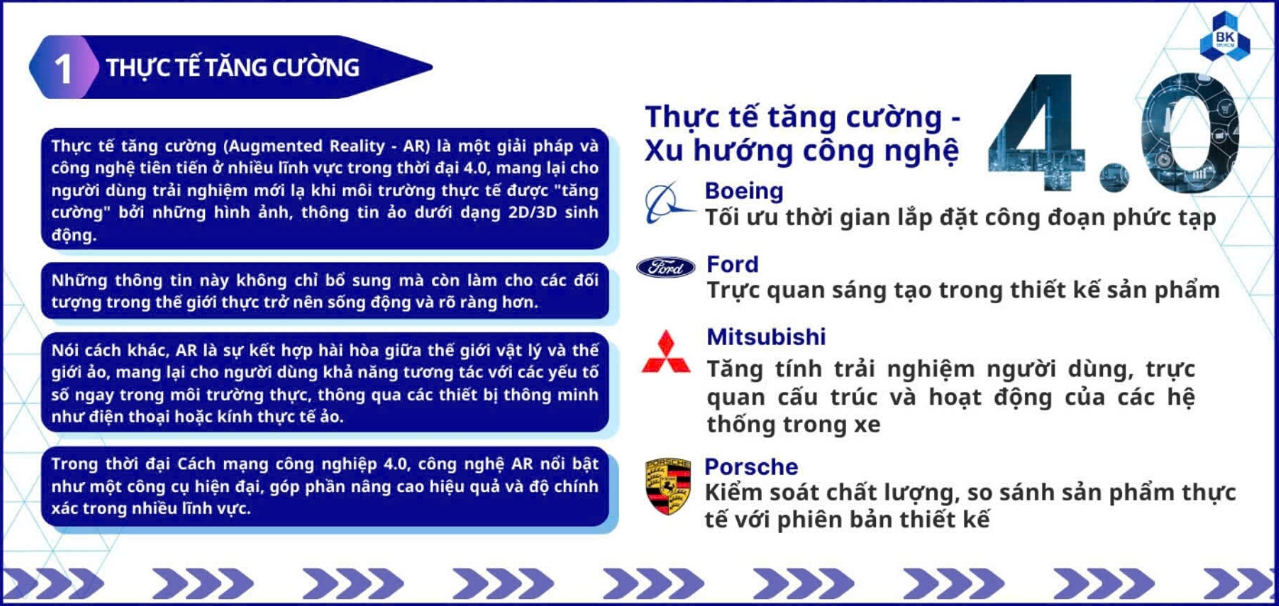
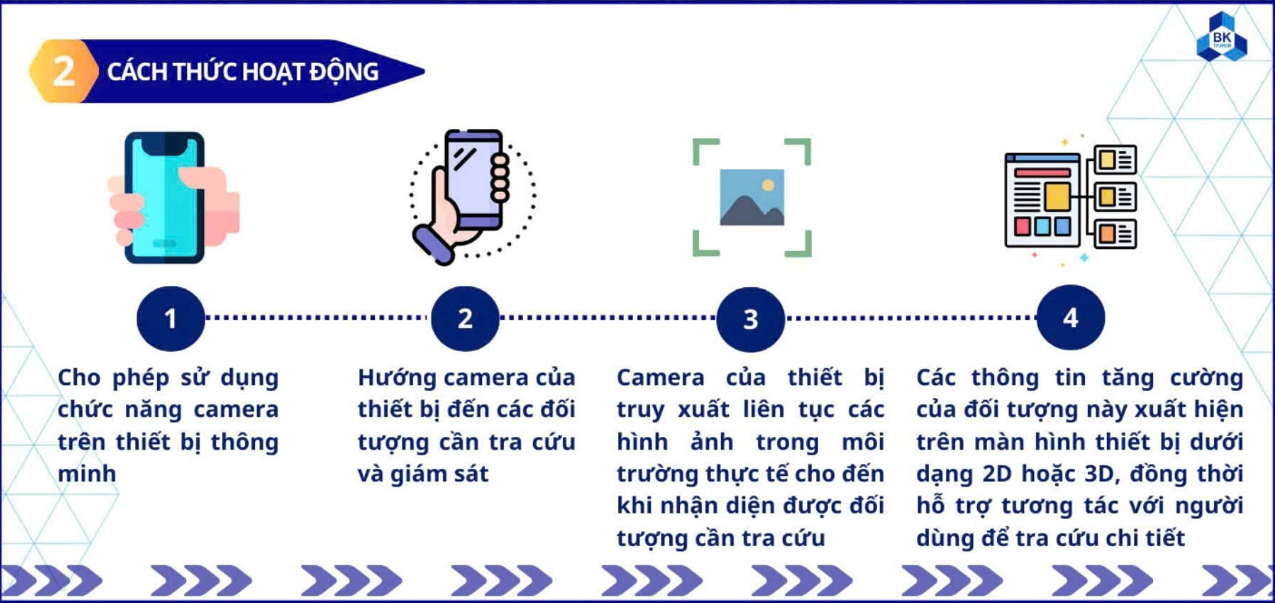
THỰC TẾ TĂNG CƯỜNG (AR)
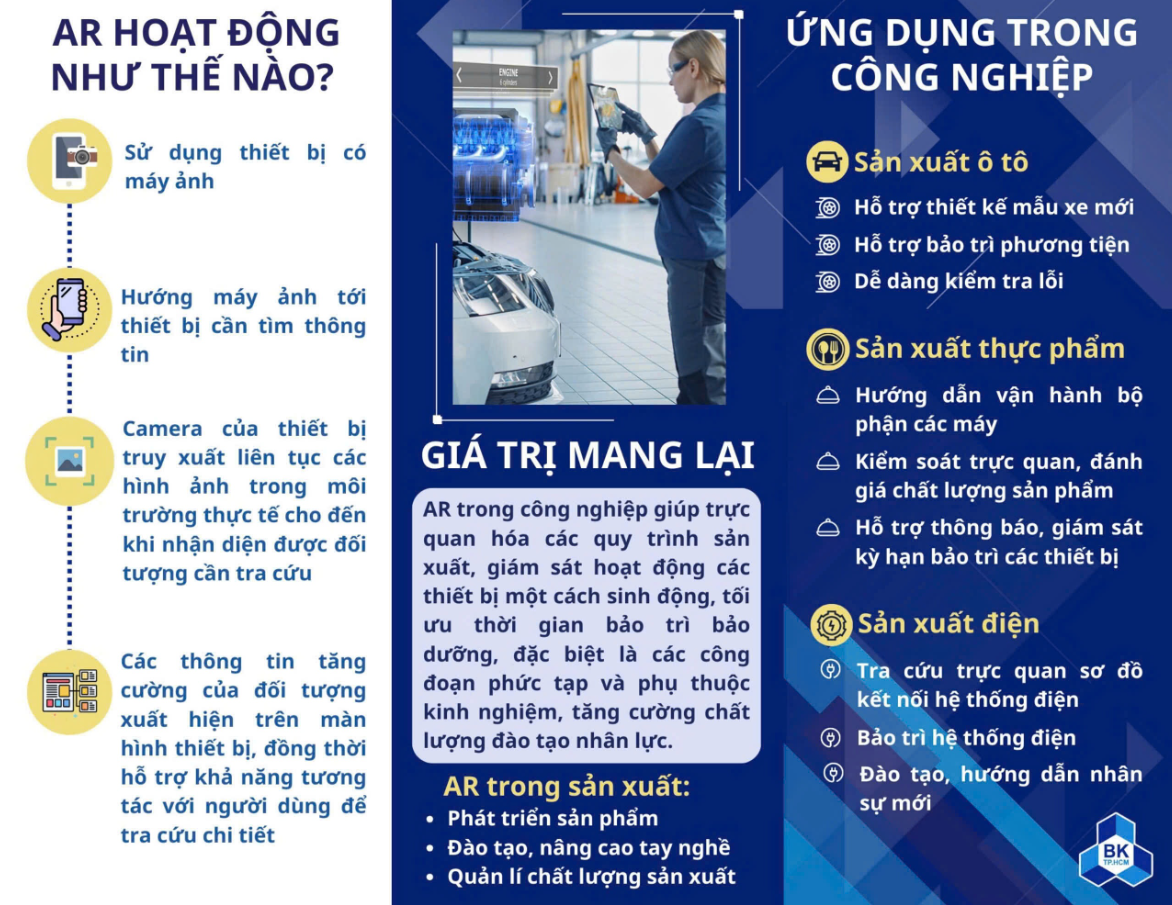
Thực tế tăng cường (AR) là sự tích hợp thông tin từ máy tính vào môi trường thực tế, trong đó việc chèn hình ảnh vào tầm nhìn của người dùng là chủ yếu. Công nghệ AR giúp nâng cao năng suất làm việc, cung cấp một môi trường an toàn và tăng sự hài lòng trong công việc cho người lao động.
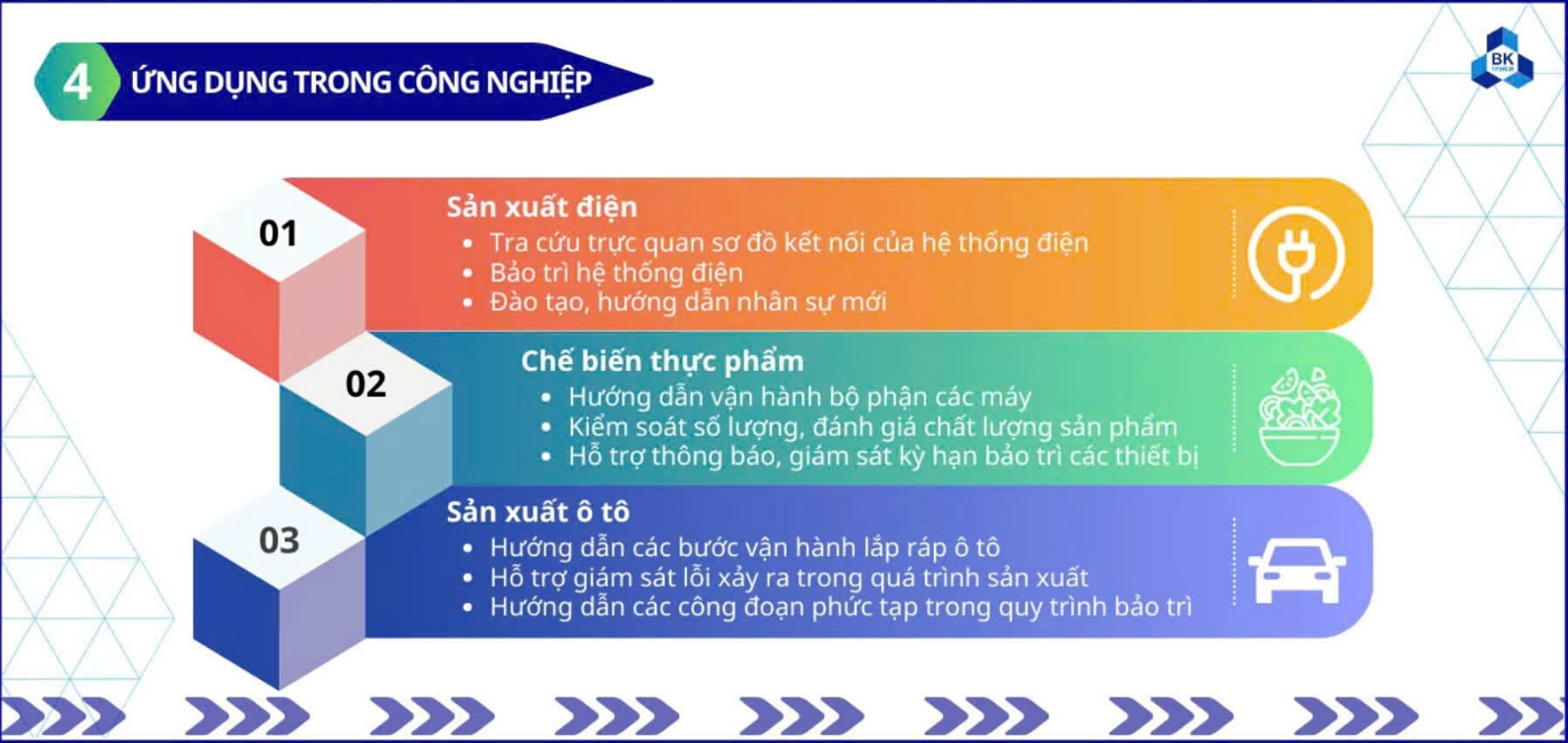
Ứng dụng của AR:
- Lắp đặt
- Bảo trì và sửa chữa
- Đào tạo kỹ thuật viên
- Kiểm soát chất lượng



Trình diễn AR với biến tần
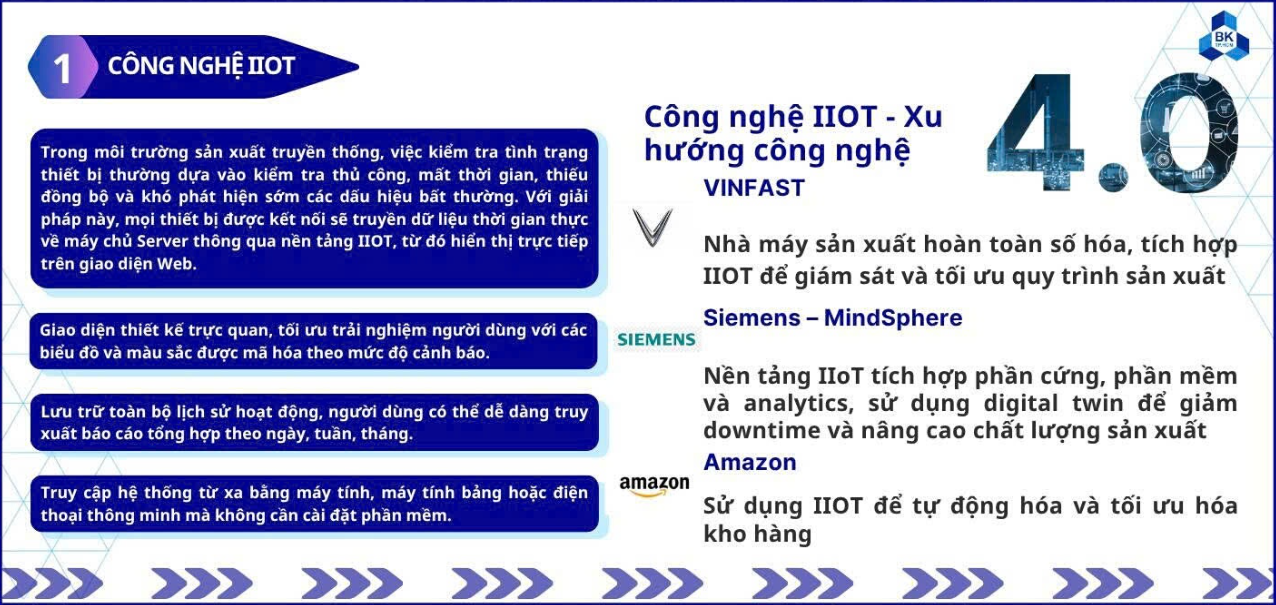
NỀN TẢNG IIOT


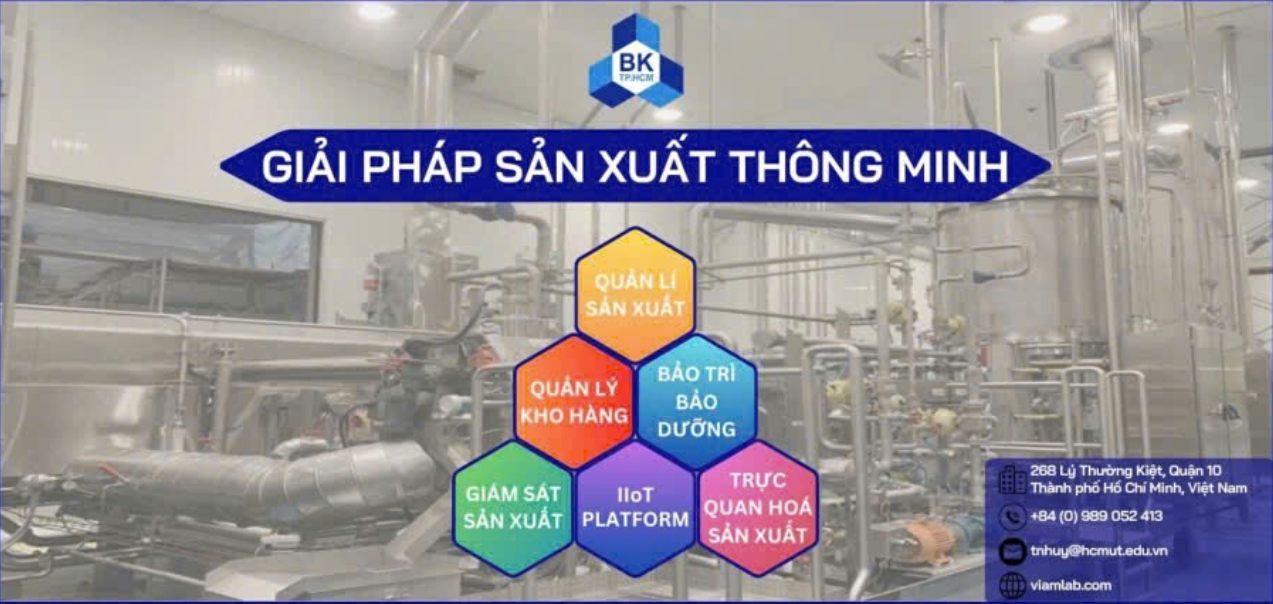
GIẢI PHÁP SẢN XUẤT THÔNG MINH

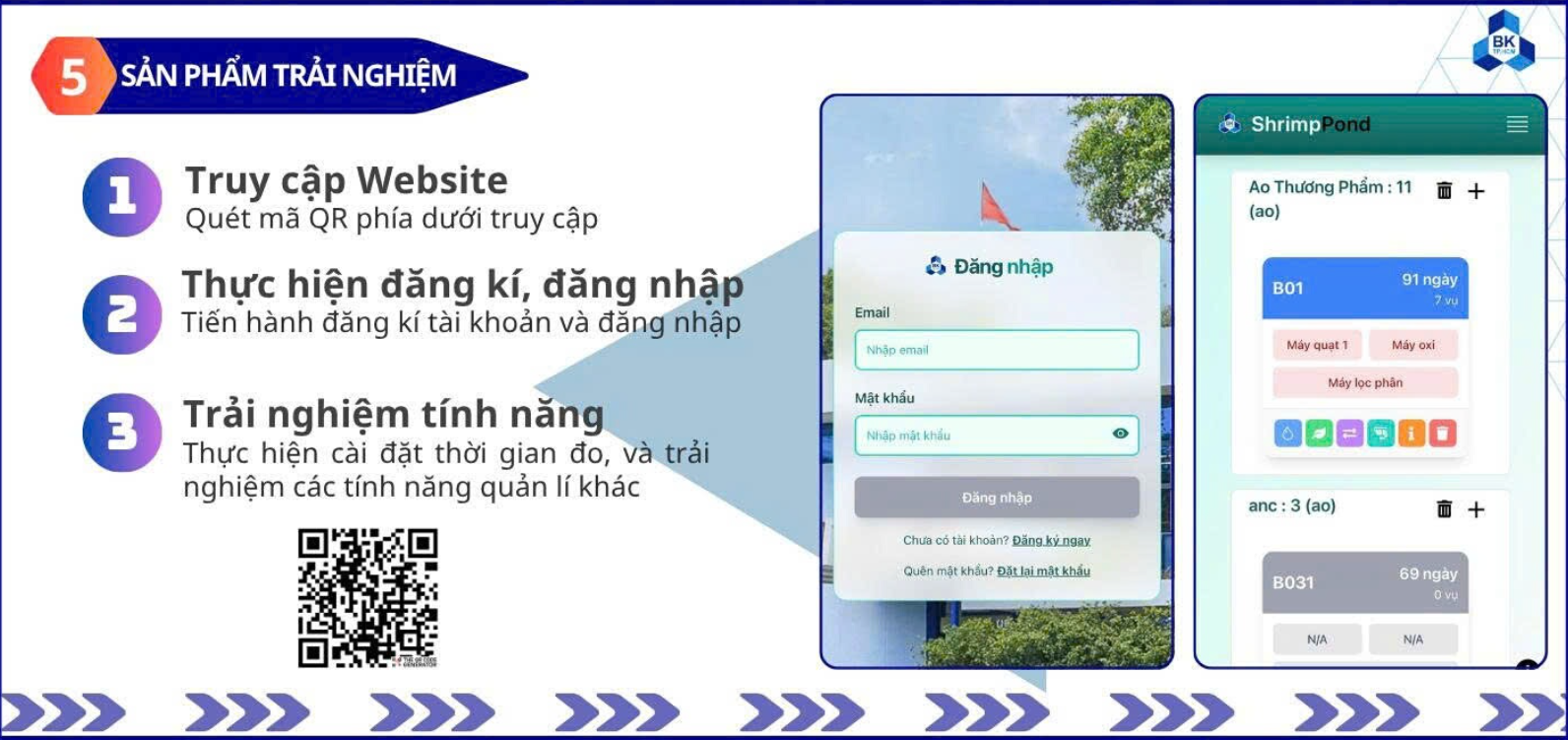
HỆ THỐNG QUẢN LÝ VÀ QUAN TRẮC AO TÔM


NHÀ THÔNG MINH
Giới thiệu:
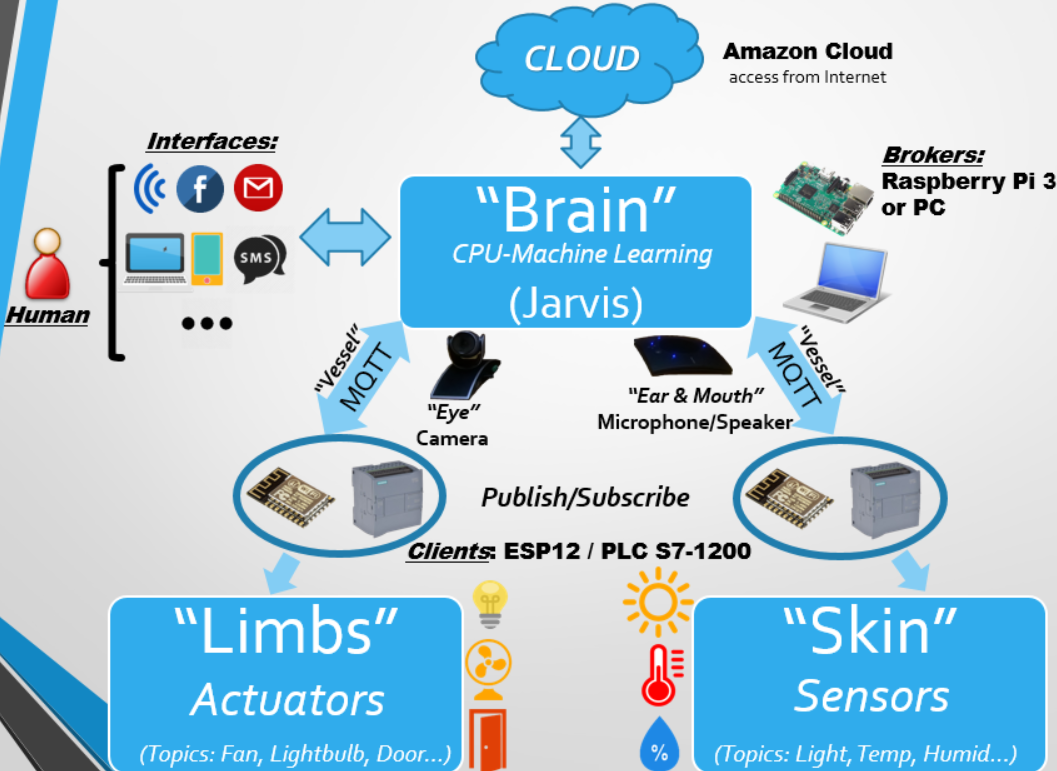
Hình 1: Cấu trúc và thuật toán của ngôi nhà thông minh được thiết kế
Xem video tại:
MÀN NƯỚC SỐ
Màn nước số là hệ thống hiển thị hình ảnh bằng nước thông qua việc điều khiển đóng mở các van theo một kịch bản đã định. Trong những năm gần đây, các hệ thống này xuất hiện ngày càng nhiều, đem lại lợi ích kinh tế và được ứng dụng rộng rãi trong trang trí, quảng cáo sự kiện, trung tâm thương mại và phòng trưng bày sản phẩm. Khi kết hợp âm nhạc và hiệu ứng ánh sáng, màn nước số tạo ra cảm xúc mạnh mẽ hơn so với hệ thống chiếu sáng thông thường.
Nhu cầu về thiết bị rất lớn, nhưng chi phí đầu tư cho màn nước số khá cao do phải nhập khẩu và việc bảo trì, thay thế cũng gặp nhiều khó khăn. Vì vậy, xu hướng nội địa hóa màn nước số trên thị trường là một nhu cầu cấp thiết để tăng tính cạnh tranh so với sản phẩm nhập khẩu.

Hình 1: Màn nước số
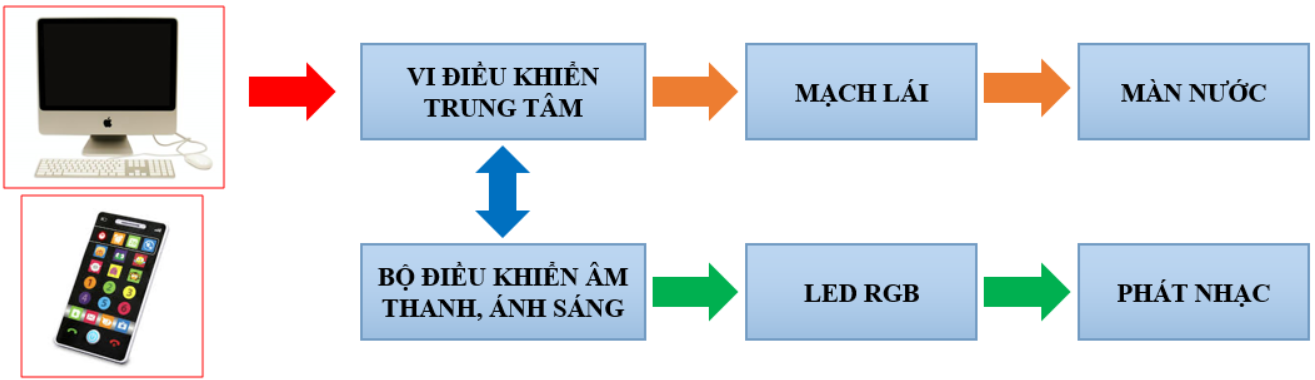
Hình 2: Hệ thống điều khiển
Giao diện trên PC (GUI): Chương trình nhập ảnh cần hiển thị lên màn nước.
- Chuyển bất kỳ ảnh nào thành ảnh đen trắng.
- Tỷ lệ kích thước ảnh để phù hợp với số van trên màn hình.
- Thực hiện script và chuyển dữ liệu hình ảnh xuống để lưu vào thẻ SD.
Điện thoại thông minh: Nhập ảnh hoặc tự tạo hình ảnh riêng.
Vi điều khiển: Các board chủ yếu được dùng để xử lý và điều khiển van sao cho một hình ảnh hoặc kịch bản có thể hiển thị trên màn nước.
Driver: Dùng để chuyển tín hiệu MCU thành lệnh đóng/mở van nước.
Màn (Curtain): Hệ cơ khí được lắp van điều khiển.
Bộ điều khiển ánh sáng dựa trên tín hiệu âm thanh: tăng hiệu ứng thu hút cho màn nước số
Xem video: