Scara-Classify Objects on Dynamic Conveyor
The main task of the equipment is as follows:
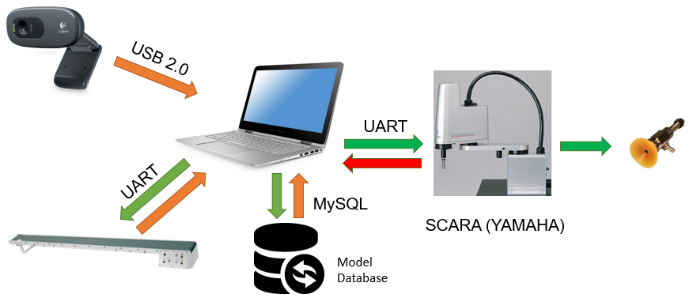
- Atmega328: will control the conveyor by PID, read data encoder to gripping the moving objects. Send the encoder pulse data to the computer.
- Computer: is used to collect data from the camera, process images, receive data from Atmega328 and send data to the controller.
- Controller of Robot: receive data from computer, control robot to gripping objects.

Figure 1: Control system structure
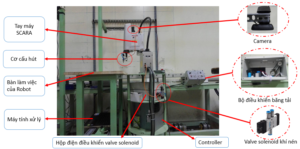
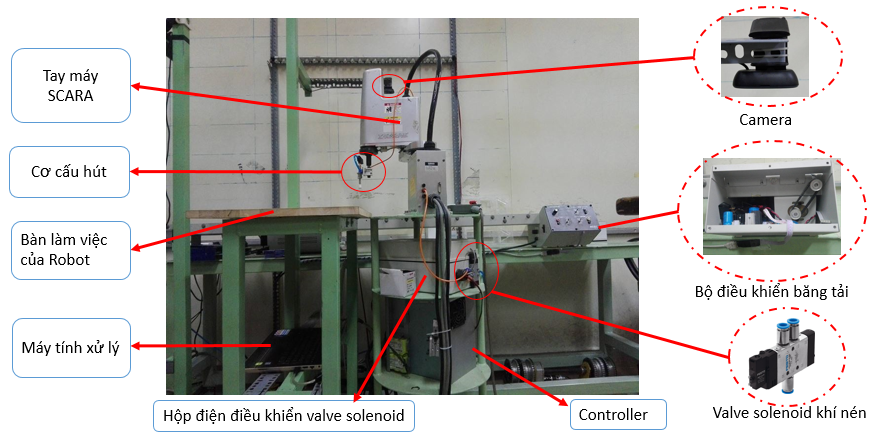
Figure 2: Model of control system
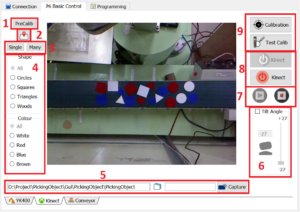
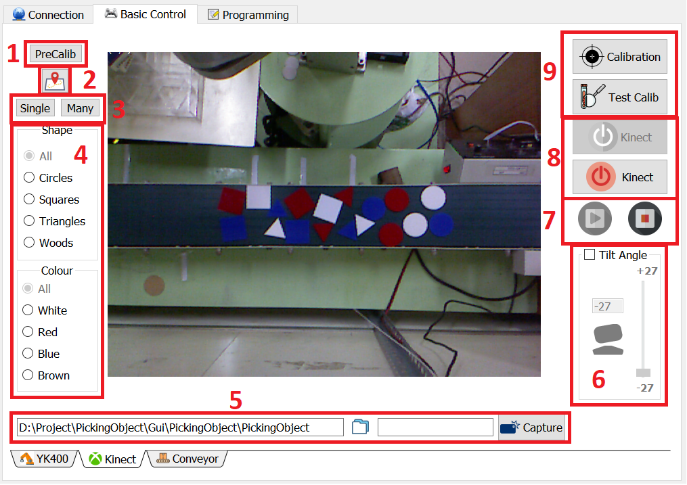
Figure 3: Software control interface
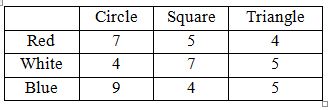
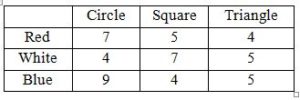
Sort by color and shape:
Objects, numbers and colors:
Working conditions:
- Maximum conveyor speed is 5cm/s.
- The object is randomly selected and dropped regardless of the order and direction of rotation.
- Light reference is not changed.
Output result as following:
- Total object: 50
- Missing object: 0
- The number of objects is misclassified: 0
- Number of objects in the wrong direction: 0
- Total time to execute: < 2 min.
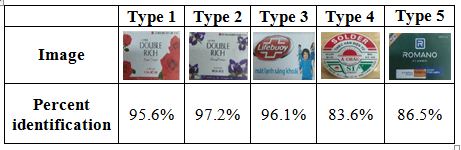
Classification based on the characteristics of the object:
Watch video: