Scara-Classify Objects on Dynamic Conveyor
Nhiệm vụ chính của các thiết bị như sau:
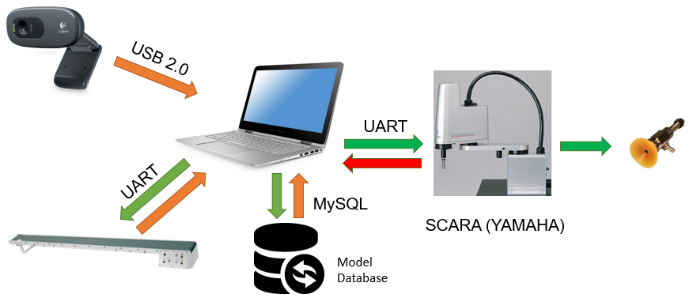
- Atmega328: điều khiển PID băng tải, đọc dữ liệu encoder để thực hiện gắp vật di động. Gửi dữ liệu xung encoder lên máy tính.
- Máy tính: dùng để thu thập dữ liệu từ camera, xử lý ảnh, nhận dữ liệu từ Atmega328 và gửi dữ liệu xuống bộ controller.
- Bộ controller của Robot: nhận dữ liệu từ máy tính, điều khiển robot gắp vật.

Hình 1: Cấu trúc hệ thống điều khiển
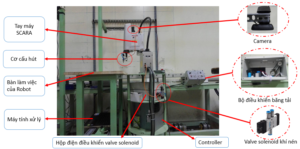
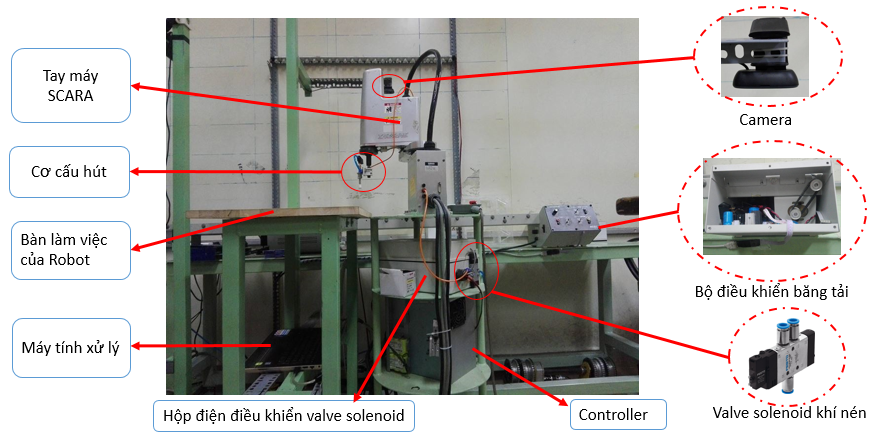
Hình 2: Mô hình hệ thống điều khiển
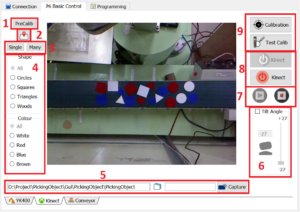
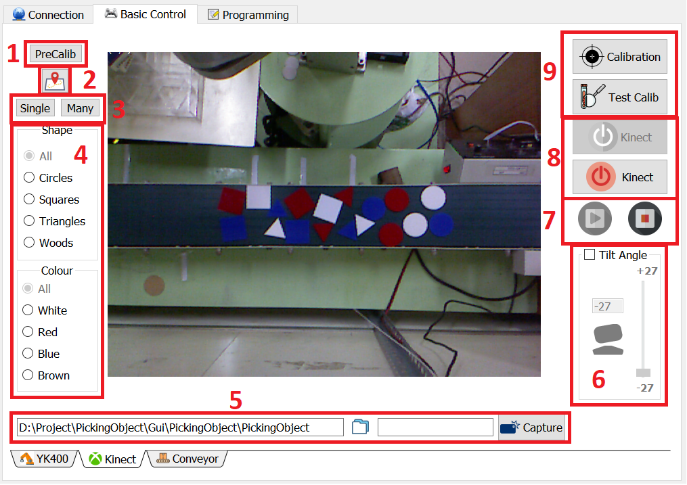
Hình 3: Giao diện phẩn mềm điều khiển
Phân loại theo màu sắc và hình dạng:
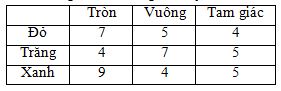
Đối tượng vật, số lượng và mày sắc:
Điều kiện làm việc:
- Tốc độ băng tải tối đa là 5cm/s.
- Vật được thả ngẫu nhiên không theo thứ tự và hướng xoay cả mọi vật đều ngẫu nhiên.
- Điều kiện chiếu sáng là không đổi.
Kết quả thực hiện cụ thể như sau:
- Tổng số vật: 50
- Số vật bị bỏ lỡ: 0
- Số vật bị phân loại sai: 0
- Số vật xác định sai hướng: 0
- Tổng thời gian hoàn tất 50 vật <2 phút.
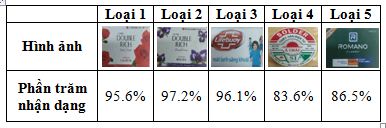
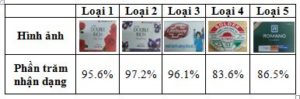
Phân loại dựa vào đặc trưng của đối tượng:
Xem video tại: