RV 2AJ-Classify and pick Objects using 3D pointcloud
Với sự phát triển chóng mặt của công nghiệp hiện đại đòi hỏi việc tăng năng xuất thì việc áp dụng các công nghệ khác vào dây chuyền cùng với robot là điều tất yếu trong đó thị giác máy tính là một mảng đang vươn lên trở thành “con mắt” cho robot để thực hiện các công việc. Hiện nay bin-picking chia làm 2 mảng nhỏ là 2D và 3D:
Bin-picking 2D: các chi tiết có cùng hình dáng kích thước và độ cao cố định. Thường được ứng dụng trong việc gắp các vật thể chạy trên băng tải. Hệ thống bao gồm camera nhận diện được gắn cố định với chiều cao xác định và robot chủ yếu là robot song song hay scara. Hướng này hiện nay đang được ứng dụng rất nhiều trong công nghiệp.
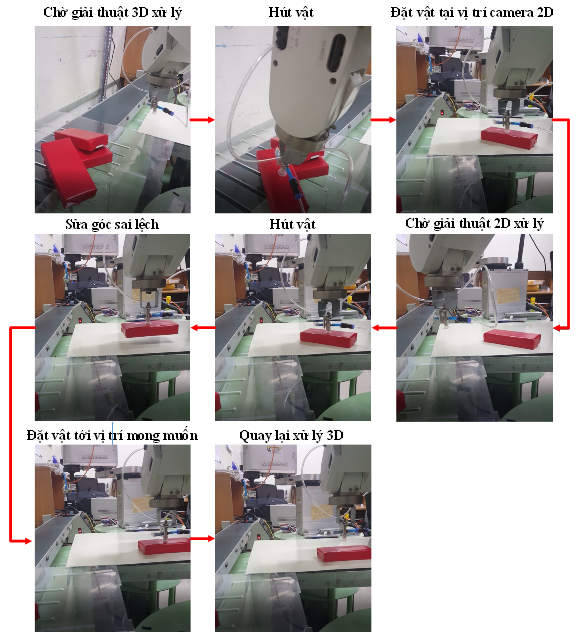
Bin-picking 3D: các chi tiết có cùng kích thước, hình dạng không quá phức tạp được đặt ngẫu nhiên trong một vùng không gian nhất định, các chi tiết chồng lấn lên nhau nên cần xác định rõ độ sâu của chi tiết. Hệ thống gồm cảm biến độ sâu trả về đám mây điểm, tay máy 5DOF hoặc 6DOF, ngoài ra còn có thể có thêm camera phụ xác định vị trí sau khi gắp để đặt chính xác chi tiết vào vị trí mong muốn.
Hình 1: Mô hình thực nghiệm
Mô hình thực nghiệm bao gồm: Camera 3D, camera 2D cùng với tay máy công nghiệp RV-2AJ 5DOF của hãng Mitsubishi. Mẫu được sử dụng là khối hộp chữ nhật đồng màu.